读懂机器人的“心”: MIT科学家开发出可度量的虚拟现实系统
MIT最新发布了一个实验,可以将机器人的感知投影出来:
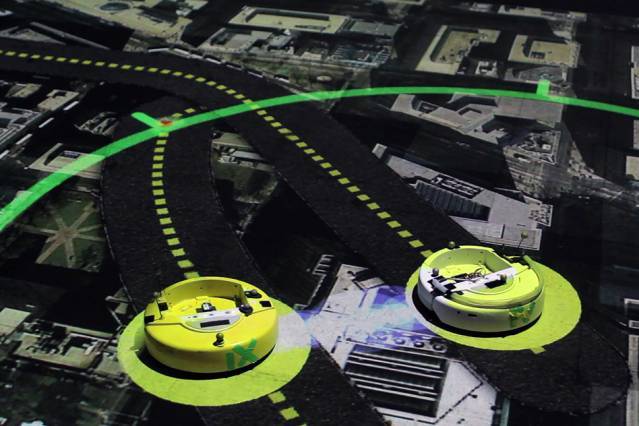
当机器人行动时,如果有障碍物挡在它的路线上,它首先就需要确定障碍物的位置,然后重新选择最优路径来避开。在这个实验里,由一个行人来充当障碍物的角色。当机器人在选择路线时,它的“思想”就被投影在地上:一个粉红色的点追随在这个行人身上,这个点代表机器人对这个行人位置的感知;各种线条,代表机器人可能选择的路径,这些线条发射出各种颜色的光线,而绿色那条表示最优路径。当机器人和行人在移动时,各种线条和粉红色的点也一直在移动并调整。
这套新的视觉化系统结合了置顶式投影仪、动作捕捉技术和动画软件,从而可以实时投影一个机器人的行动意向。开发者把这套系统命名为“可度量的虚拟现实(measurable virtual reality)”,让人们可以用眼睛看到机器人的感知和理解。
这套系统的开发者Agha-mohammadi说:“通常,一个机器人可以做出一些决策,但是你无法确定它到底在想什么,为什么它会选择某一路径。如果你可以把机器人的行动计划投影出来,你就可以把它的感知和它的行动意义联系起来。”
Agha-mohammadi表示,这个系统或许可以帮助开发无人驾驶汽车、快递用无人驾驶飞机,以及其他自动化的交通工具。
“作为开发者,当我们可以比较机器人的感知和它的行动方式时,我们就可以更快发现我们程序中的bug。比如说,当我们实验一台飞行器时,我们看到它脑子里有些地方出错了,我们可以在它撞墙或坠毁前修改程序。”
利用这套系统,人们还可以创造各种场景来测试无人驾驶工具的户外性能,而不需要一开始就在现实中进行测试。
比如,未来可以用无人驾驶飞机去灭火,为了实现这一目的,他们首先用这套系统测试了一下。除了投影出无人机的行动意向,研究人员还可以投影出仿真场景来模拟森林大火,并且仿真出无人机的视角,看它是否会撞到发生火灾的森林里的树上。研究人员还将仿真出城市里的街景,就像Google Maps那样。
由于联邦航空管理局限制在户外做无人机测试,所以在虚拟环境里测试就很有必要了。
让我们看看这个实验视频吧,很酷哦!




行业专家共同推荐的软件
包图网
- 4.2
(241)咨询产品免费试用稿定设计
- 4.0
(193)咨询产品免费试用fotor懒设计
- 4.1
(49)咨询产品免费试用



限时免费的在线作图软件
千图网
- 4.1
(293)咨询产品免费试用创客贴
- 3.9
(243)咨询产品免费试用摄图网
- 4.2
(86)咨询产品免费试用



新锐产品推荐
易盘点
- 4.0
(1)咨询产品免费试用小鸟云-弹性云服务器
- 0.0
(0)咨询产品免费试用悠络客AI巡店
- 0.0
(0)咨询产品免费试用




