揭秘3D点云语义分割工具
随着自动驾驶技术发展驶入快车道,3D传感器的使用正在变得越来越普遍。常见的3D传感器包括激光雷达、毫米波雷达、深度相机、3D扫描仪等,它们可以从现实世界中获取物体和环境的几何、形状和比例信息,帮助AI理解现实环境。

3D传感器的扫描数据通常以3D点云的形式保存每个点的信息,包括三维坐标、反射率、尺寸等。如何从3D点云中获取有用的信息,是人工智能的重要研究领域。

澳鹏Appen中国研发中心融汇全球经验、针对本土行业特点自主研发的人工智能辅助数据标注平台,集成了为多样场景定制的标注工具箱。其中,3D点云语义分割工具是标注点云的常用工具。该工具能够解析并展示3D点云数据、对每个点赋予语义标签,以实现对现实中三维场景的解释。
► 3D点云语义分割基本操作
第一步:将点云中的点以某种方式进行区分
第二步:将不同的点标注上不同的语义标签
#1 区分点
在采集点云数据时,可以同步采集同一个环境的2D图像,在标注时可以对照点云和2D图像,以判断点的语义。
工具提供点云调色板,项目经理可以提前配置标注任务的点云色彩渲染方案,标注员也可以在标注过程中根据实际场景调整并保存其他配色方案。合适的色彩渲染方案可帮助标注员分辨点云场景中的物体,大大提高标注效率及正确率。
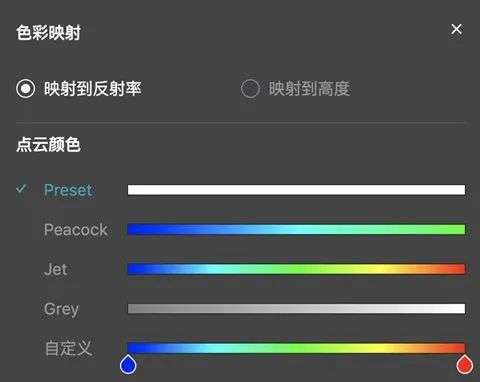
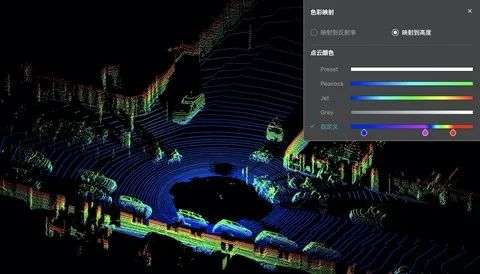
配置点云色彩渲染方案,首先需要根据点云数据的某个特征进行上色。不同的物体在反射率和高度等信息上会有区别,工具支持按照反射率或高度,将不同的点渲染为不同的颜色,以进行区分。
工具支持自定义点云颜色渲染。用户可以自定义控制点的数量、位置和颜色。
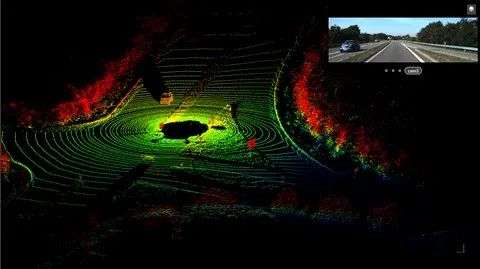
▲ 按照物体高度调色
下图中,通过高度和自定义的三个控制点,可以非常明显地区分出场景里的地面及地面上的物体,比如车、人、杆状物、墙等等。
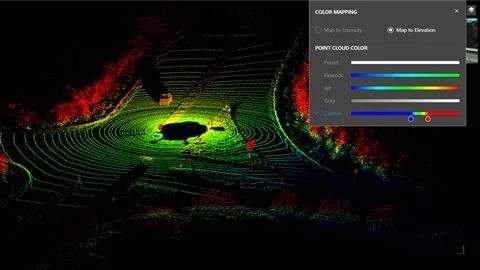
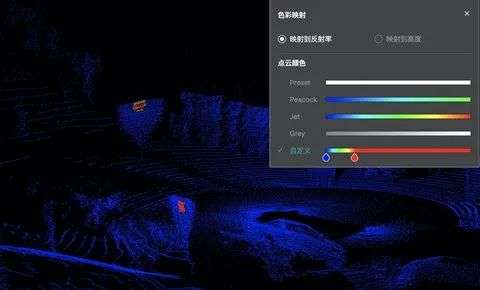
反射率映射方式则通常应用在车道线或者交通标志的标注任务中。
▲ 按照物体反射率调色
车道线和交通标志的反射率通常和周边环境有很大的区别。比如,下图中的红色区域就是交通标志牌。
除了反射率和高度,工具还可以根据客户需求定制点云颜色渲染方案。比如根据点的速度信息,用颜色可视化场景中的运动物体,可以知道哪些物体是远离采集车、哪些物体是靠近采集车。在融合点云的场景中,可以根据点所属的采集设备,用颜色区分不同激光雷达采集到的点。

#2 标注语义标签
针对不同的标注要求和场景,可以选用不同的标注工具。常用的标注工具包括:单点、笔刷、多边形等。使用工具选择一个或多个点,并对这些点标注语义标签。
▲ 标注工具:单点
▲ 标注工具:笔刷
▲ 标注工具:多边形
澳鹏Appen是全球领先的AI训练数据服务提供商。凭借20多年的海外平台实践,澳鹏中国产研精英团队独立自主打造了适合本土行业特点的“高精度AI数据服务平台”,集成了强大的产品技术攻关能力、高效的项目管理水平及百万级众包资源。目前已助力全球7500+个AI项目研发及商业化。
澳鹏(中国)人工智能辅助数据标注平台,集成多样标注工具箱 覆盖各种标注场景





行业专家共同推荐的软件
包图网
- 4.2
(241)咨询产品免费试用稿定设计
- 4.0
(193)咨询产品免费试用fotor懒设计
- 4.1
(49)咨询产品免费试用



限时免费的在线作图软件
千图网
- 4.1
(293)咨询产品免费试用创客贴
- 3.9
(243)咨询产品免费试用摄图网
- 4.2
(86)咨询产品免费试用



新锐产品推荐
极速聚米-MES制造执行系统
- 0.0
(0)咨询产品免费试用极速聚米-固定资产管理软件
- 0.0
(0)咨询产品免费试用Aiveo
- 4.1
(40)咨询产品免费试用软星仓储管理系统
- 0.0
(0)咨询产品免费试用IFS企业资产管理(EAM)
- 0.0
(0)咨询产品免费试用IFS智慧水务
- 0.0
(0)咨询产品免费试用







