Project Wing vs Prime Air,无人空域谁主沉浮?

编者注:本文作者杜昊,作者简介:Former Design Team Leader from DJI,6 years engaged in Unmanned System R&D. 他的邮箱是massiach[at]163,大家可以和他邮件交流。另外,本文乃真·技术贴,非无人机爱好者慎入。
自Project Wing(以下简称Wing)面世之后,Google成为继Amazon、DHL、SF等众多物流商后又一个公布无人机开发计划的公司,与其他公司采用的多旋翼不同的是,Google的Wing采用了固定翼与多旋翼的复合式设计方案,其与传统的多旋翼相比具有明显的航程和效率优势,在其他条件相同的情况下,Wing有望实现两倍于传统方案的运送距离,而时间减少50%。
因此,本文将从技术角度将Wing与Amazon 的Prime Air(以下简称Prime)进行对比,来说明Wing在物流运输方面的优势。
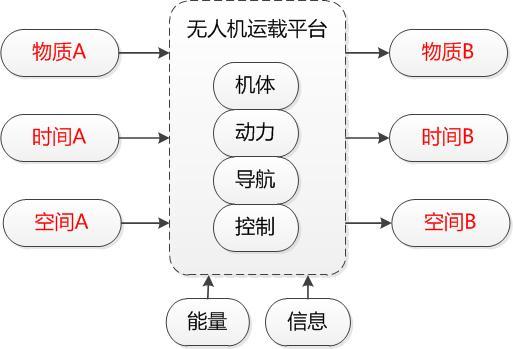
本质上讲,物流过程包含了5个变量
质量:被运对象重量
空间:完成被运对象的空间位置转换
时间:需要的时间
能量:需要的能量输入
信息:需要的信息输入
其中前三个为输出变量,或称目标变量;后两个为输入变量,或称成本变量。对于目标变量,我们希望单位成本条件下,载重更大,距离更远,位置更精确,时间更短,这是对两种方案的共同要求;对于成本变量,信息输入主要与投送精度相关,需要由导航控制系统与其它传感器实现,属于通用技术,并非两种设计方案的主要区别;能量输入取决于前三个变量和无人机能量效率的综合,重量越大,空间距离越长,时间越短,需要的必要能量就越大,无人机平台需要在实现必要目标变量的同时,尽量提高能量使用效率。
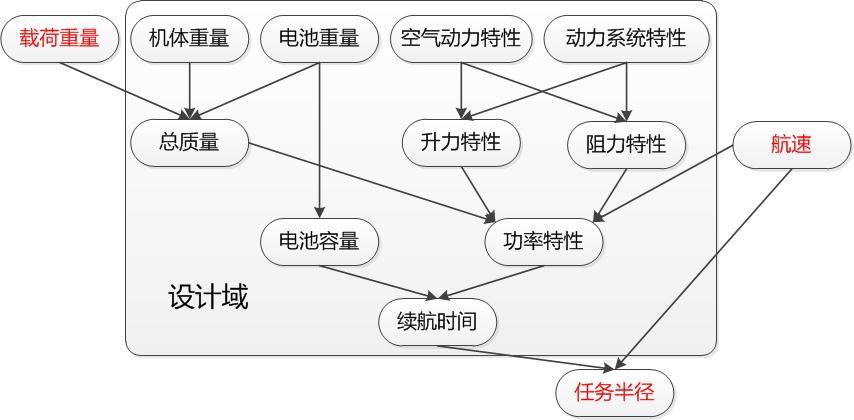
对于无人机而言,质量、空间、时间三个目标变量分别对应有效载荷、任务半径(往返航程)、航速三个设计指标,对此可以通过能量转化过程进行分析,如下图所示:
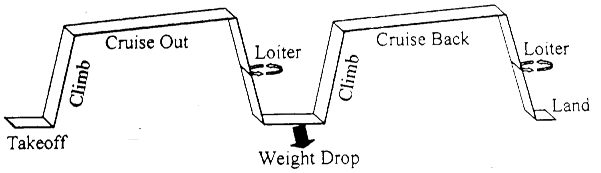
而对用于物流的无人机而言,实现能量转化的部分是其机体与动力系统,其决定了系统对能量的利用效率。单件物流任务属于点对点飞行任务,如图所示,其航程可大致分为起降段与巡航段,通常巡航段会占全航程80-90%的比例,因此提高巡航段的效率成为方案设计的重点。若要提高整机的能量效率,现有技术条件下电池的能量密度已接近理论极限,因此改善空气动力特性与动力系统特性成为性价比最高的解决方案,这也是Wing和Prime的最大区别所在。
Wing采用固定翼与多旋翼复合设计方案,在起降段采用四旋翼方式,在巡航段采用固定翼方式,固定翼的特点是高速巡航效率高,而且Wing采用的飞翼布局较常规固定翼更高效,但无法垂直起降和悬停;而多旋翼的特点是可以垂直起降,但能量效率还不如常规直升机,且水平速度越高效率越低,巡航效率通常仅有固定翼的50%乃至更低。
对于巡航段占全航程80-90%的任务而言,Wing的复合设计方案具有显著的能量效率优势。由于Wing的设计初衷是运送心脏除颤器,因此速度和航程是关键指标,而采用复合设计方案是更为合理的。相对而言,Prime若要执行与Wing相同的高速任务,需要增加至少30-50%的起飞重量与电池容量。
Wing在固定翼方式下还具有一个优点,就是利用固定翼的气动稳定性提高安全系数,若四个旋翼中的一个或两个发生故障,还可以进行滑翔降落,而多旋翼若出现动力故障,在升力裕量不足时只能自旋迫降。这一点为Wing的安全性加分不少,当然,这建立在稳定的控制系统基础之上。
对于项目的经济性而言,实际Wing与Prime的硬件成本相差不大,Wing还可能略胜一筹,但由于复合方案的系统更加新颖与复杂,相对已经成熟的常规方案将增加不少研发时间与成本,其测试与验证也将花费更多资源。
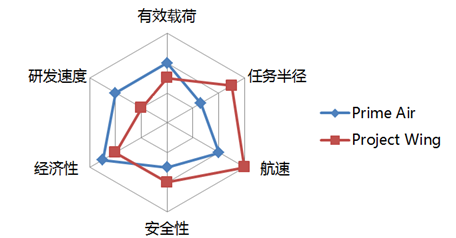
综上所述,相对Prime等常规多旋翼机,Wing以其高能效在任务半径和航速上将具有明显优势,但由于新技术的研发需要更多资源,现阶段的经济性与研发速度将稍有落后,这是很多技术革新的必经之路。下图为Wing与Prime的性能对比预测,并非真实数据,仅供参考。
新技术并非一蹴而就,对于复合式无人机而言,需要解决的技术问题较常规无人机更多,举例如下:
1.飞行控制:为实现飞行模式的转换,需要对转换过程建立可变结构控制模型,由于外界扰动的不确定性和系统参数化的困难,加上载荷的重量分布不同造成的系统重心变化,以上因素都为控制系统提出了新的课题,研发高稳定性的飞控,需要对飞行力学和控制模型具有较高的认识水平。
2.空气动力学:无人机在巡航过程和起降过程中,其气流与机体的作用方式不同,为保证两种飞行模式下都可以稳定高效地工作,需要对空气动力学参数进行协调,例如加大机翼展弦比(对于简单机翼可认为是长宽比)可以增加固定翼模式下的飞行效率,却增加了多旋翼模式下飞机对阵风的敏感性,因此需要对两种工作模式进行联合设计,获得优化设计方案。
3.能源与动力:在多旋翼模式下,一般对垂直推重比(这里指垂直推力和机体全重的比值)要求在至少1.5以上,而固定翼水平飞行时要求水平推重比(这里指水平推力和机体全重的比值)在0.3-0.8之间即可,且同一组旋翼很难在低速与高速同时满足高效率,因此需要对任务过程进行整体统筹,对动力在不同工作模式下进行加权分配设计,实现优化方案。
4.结构与材料:在多旋翼模式下,机翼属于无效重量,造成该状态下能量效率降低,若要进一步提高飞行效率,需要采用轻质高强的材料制作机翼及其他结构部件。
复合式无人机发展至今已有10多年的历史,能否在历史舞台粉墨登场,还有待于工程师的不懈努力与市场的残酷考验。面对成熟技术与革新技术一快一远的两条路,有的人选择了别人未选择的那一条,充满荆棘,却通往希望闪烁的彼岸。
May Be Continued:X-Plane,复合式飞行器的春秋





大厂都在用的在线作图软件
包图网
- 4.2
(241)咨询产品免费试用稿定设计
- 4.0
(193)咨询产品免费试用fotor懒设计
- 4.1
(49)咨询产品免费试用



限时免费的在线作图软件
千图网
- 4.1
(293)咨询产品免费试用创客贴
- 3.9
(243)咨询产品免费试用摄图网
- 4.2
(86)咨询产品免费试用



新锐产品推荐
OneHash CRM
- 4.2
(10)咨询产品免费试用Matomo
- 4.2
(40)咨询产品免费试用易企用车
- 0.0
(0)咨询产品免费试用资产小达人
- 0.0
(0)咨询产品免费试用分秒资产
- 0.0
(0)咨询产品免费试用B1易巡查
- 0.0
(0)咨询产品免费试用







