不仅会前、后空翻,还能跨栏、桶滚,MIT“迷你猎豹”机器人成功模仿人类
本文来自微信公众号“学术头条”(ID:SciTouTiao),撰文:杨关露 排版:库珀,编审:寇建超,36氪经授权发布。
长期以来,仿真机器人似乎总是难以达到、甚至超越人类般的运动敏捷程度,人们对机器人的印象基本是“铁块头”、笨拙、运动迟缓......如何制造一个可以在平坦路面上行走,而且不会摔倒,甚至可能偶尔爬爬楼梯的双足机器人,一直以来都是科学家们面临的一个难题。
事实上,人们在这一领域已经取得了众多突破性成果。例如,在波士顿动力等公司的努力下,如今的双足机器人至少能达到人类的运动技能。而下一个目标,就是突破人类表演极限——特技。
近日,来自麻省理工学院的研究人员研发了一种特技机器人,通过一些步态探索和简单的四条腿特技,希望让未来机器人的肢体运动更加精细化。具体而言,这种特技机器人身高约为 0.7 米,体重约为 21 公斤,很像一只直立版的迷你猎豹。
高颜值“迷你猎豹”
项目研究成员、麻省理工学院研究生 Matthew Chignoli 表示,尽管从躯干和手臂来看,它的外观像是一只直立版的迷你猎豹,但它的腿部设计是全新的,重新设计的执行器具有更高的功率和更好的扭矩密度。
"腿部设计的主要重点是实现在人类行走和跑步中发生的平稳但灵活的'脚跟到脚趾'动作,同时保持低惯性,以便与地面进行流畅的互动。"
事实上,动态脚踝动作在仿真机器人中很少见,此次研究人员希望设计出健壮、低惯性和强大的腿部,从而模仿人类腿部动作。
研究人员表示,该机器人的腿部有五个定制的执行器:三个位于臀部,一个位于膝盖,还有一个用于控制脚踝的转动。膝盖、脚踝和关节均有一个皮带传动系统,以在这些关节提供更高的扭矩。五个执行器使得每条腿在每只脚上产生三维地面反作用力,以及每只脚的转动和偏航轴的力矩。
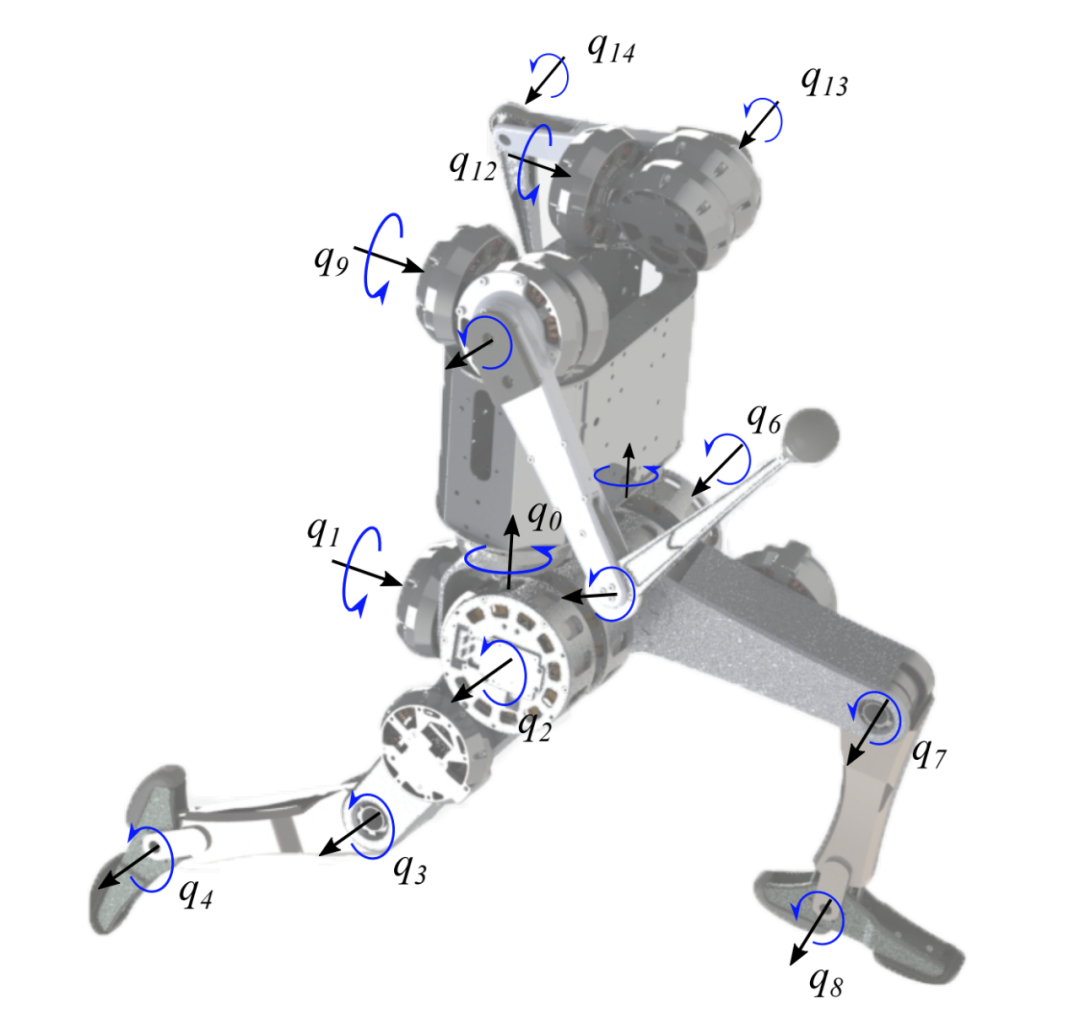
图|特技机器人拥有 5 个自由度的腿和 3 个自由度的手臂,踝关节只有俯仰方向驱动,两个接触传感器分别位于脚尖和脚后跟(来源:arXiv)
据了解,系统将由高性能60V、3Ah电池组供电。每只脚的后跟和脚趾上都装有四个无线接触传感器,用于检测接触时间。性能与规格如下:
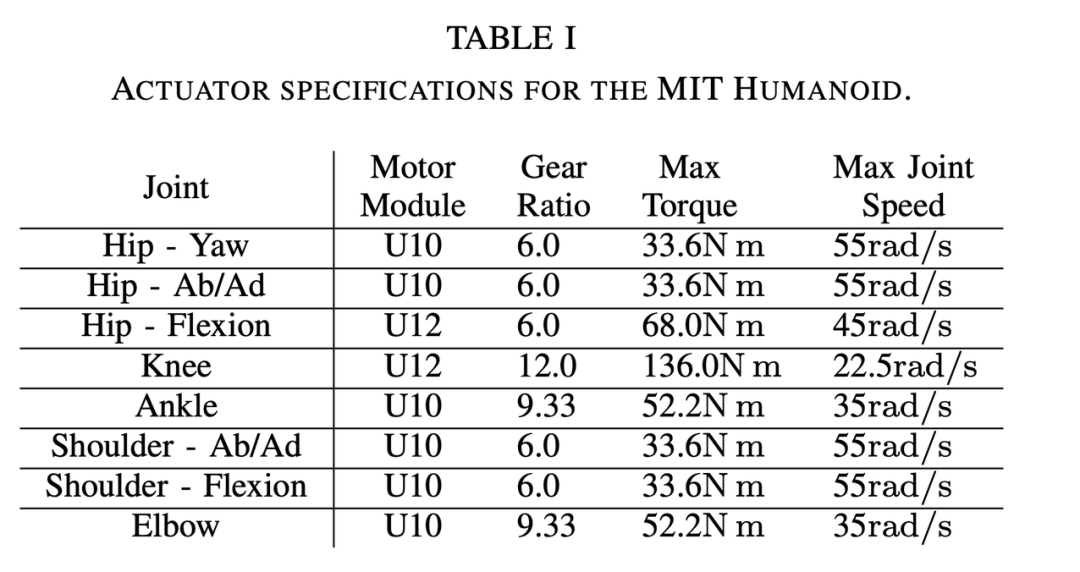
图|特技机器人的执行器规格
完美后空翻:起飞、飞行、着陆
此前研发团队开发的机器人设计模式,包含转矩密集型电机、高带宽力控制和通过后驱动缓解冲击的功能。这种设计模式使得机器人产生翻腾至空中所需的脉冲,同时确保机器人运动时的稳定性,从而可靠控制机器人在着陆时发生的高速撞击。这些设计原则如今也首次用于特技机器人的设计中。
为了充分发挥机器人在脉冲运动中的动态能力,研究人员研发了一种新的 Kino 动态规划器,有效地处理了机器人的执行器极限,同时采用了分层控制框架,有效地将模型预测控制和全身控制相结合,从而实现跳跃后的稳定着陆。
在先进原理和精密电机的加持下,仿真机器人实现了“惊险的跳跃”。仿真机器人的“后空翻”运动分为三个阶段:起飞、飞行和着陆。
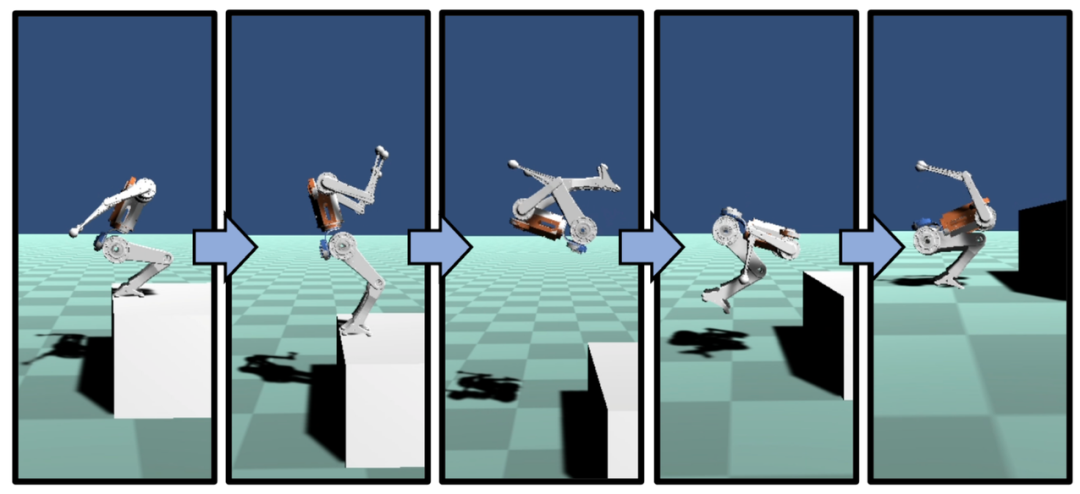
图|麻省理工学院仿真机器人后空翻
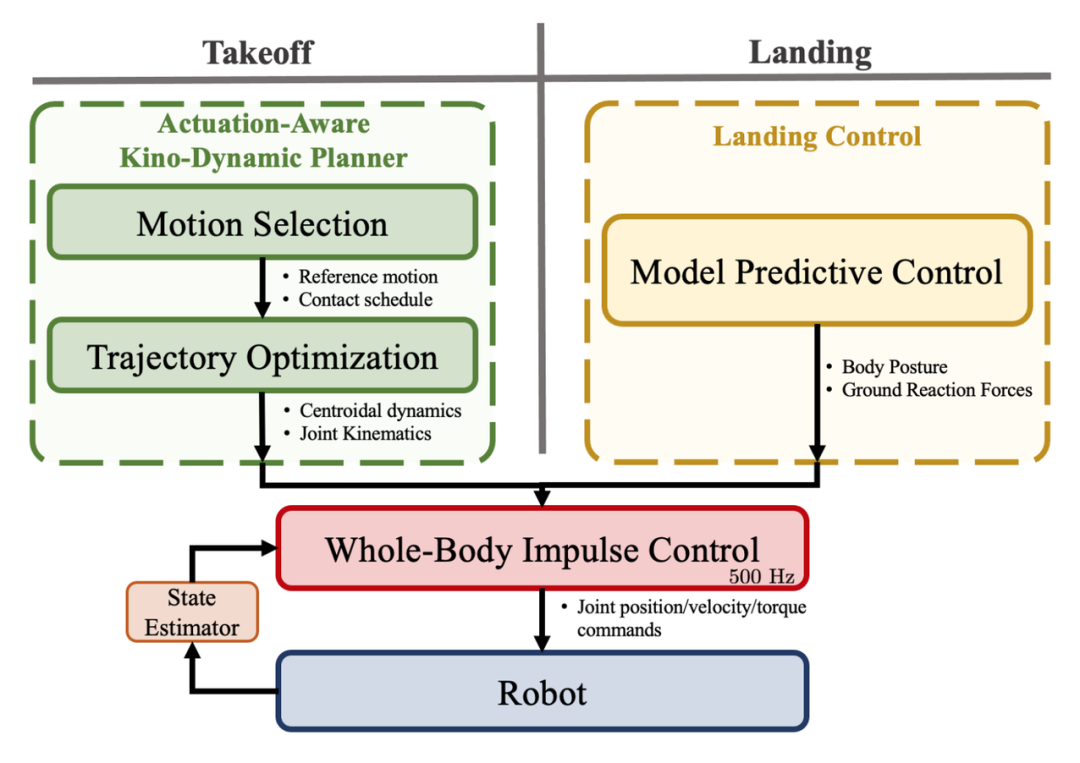
图|规划和控制框架
Kino动态规划、基于MPC的着陆控制和WBIC框架,实现仿人机器人的动态空中运动
起飞阶段,是通过新研发的驱动感知 Kino 动态规划(AAKD)进行的。AAKD 规划的第一个步骤是运动选择,它基于对地形和任务的评估,为机器人选择必要的运动(例如跳到桌子上、做一个后空翻等)。第二步骤是基于质心动力学的轨迹优化,为机器人找到一条可行的轨迹;
飞行阶段,机器人的关节简单地使用PD控制,由AAKD规划器确定配置;
着陆阶段,是维持机器人运动的稳定性是一个关键,着陆阶段的模型设置是本次研究的重大突破。在以前的工作中,WBIC与MPC共享相同的位置命令。麻省理工学院提出了一种基于简单集总质量模型的预测控制(MPC)和基于瞬时高带宽控制的全身脉冲控制(WBIC)相结合的递阶控制框架,WBIC将MPC中找到的最优运动作为位置参考,并结合反作用力指令来充分利用最优解。此外,只要不违反身体定向命令,WBIC将身体定向任务优先于质心动量任务,以跟踪所需的质心角动量。通过这种精心设计,仿真机器人在动态空中运动后可以在地面稳定着陆。
一旦机器人检测到与地面完全接触,着陆控制器就会启动,并适当吸收冲击力和耗散动能来开始稳定机器人的平衡。这就需要高带宽的反馈控制(WBIC),能够在着陆运动中实现最佳运动。二次规划(QP)的 MPC 规划反作用力分布,使机器人稳定降落至地面。在起飞和着陆阶段,规划的运动都是通过全身脉冲控制器来实现的。
期待人机共舞时刻来临
一直以来,科学家都在实现机器人运动精细化的道路上不断向前。2015 年,在 DARPA 机器人挑战赛(DRC)上,一些仿真机器人脱颖而出,为下一代仿人机器人奠定了基础。
除了此次来自麻省理工学院的“迷你猎豹”,IHMC 也曾开发出儿童大小的体操机器人,以著名体操运动员娜迪亚·科梅内奇(Nadia)的名字命名,通过液压系统为 Nadia 提供动力,使得机器人可以像体操运动员一样展示动作的速度和力量,保持非常高的运动范围。

如今,仿真机器人研究仍在继续,一方面我们追求机器人运动的精细化,另一方面我们力求机器人运动的稳定性,如果两者兼具,那么仿真机器人就能更广泛地被应用在人们的日常生活生产中,成为人类的好帮手。
或许,人与机器人“共舞”的那一天就要到来了。
参考资料
https://spectrum.ieee.org/automaton/robotics/humanoids/mit-dynamic-acrobatic-humanoid-robot
https://arxiv.org/pdf/2104.09025.pdf
https://spectrum.ieee.org/automaton/robotics/humanoids/ihmc-developing-new-gymnastinspired-humanoid-robot
https://spectrum.ieee.org/automaton/robotics/humanoids/darpa-robotics-challenge-





行业专家共同推荐的软件
包图网
- 4.2
(241)咨询产品免费试用稿定设计
- 4.0
(193)咨询产品免费试用fotor懒设计
- 4.1
(49)咨询产品免费试用



限时免费的在线作图软件
千图网
- 4.1
(293)咨询产品免费试用创客贴
- 3.9
(243)咨询产品免费试用摄图网
- 4.2
(86)咨询产品免费试用



新锐产品推荐
七牛云-视频直播
- 3.6
(30)咨询产品免费试用百家云-企业直播云
- 3.7
(44)咨询产品免费试用又拍云-UPLive
- 3.6
(12)咨询产品免费试用薪丞相
- 4.0
(2)咨询产品免费试用灵云
- 0.0
(0)咨询产品免费试用全程云CRM
- 4.0
(9)咨询产品免费试用







