无人车是怎么看世界的?德国科学家发明了一种工具让人cosplay无人车
普遍认为,无人驾驶的时代迟早会到来,只是或早或晚的问题。对于,无人驾驶,德国的研究人员提出一个有趣的研究思路——
无人车眼里的世界长什么样?
我们总是从人类的角度看无人车,换一个视角,无人车眼里的世界会有什么不同。于是,Moove Lab和Meso Digital Interiors召集了一帮人,cosplay了一把无人车。
上图片:

我认为我是一辆车
看我,长得像不像一辆车?
装备虽然看起来略微简易一些,外表看起来确实有点像豪华版的平板车。不过,这也是为了研究主题的需要。
有关未来出行的讨论,目前集中在无人车可能引起的变革上。其中,大家最感兴趣的是,无人车落地的技术可行性和商业可行性,以及由此会给我们生活带来多少影响。在大多数情况下,这些问题的探索都是在封闭的环境、特定的地域中进行的。因而广大的公众是无从接触的,只能从新闻中获得信息,而不能获取直接的体验。
研究者的目标就是通过尝试新的、沉浸式的媒介体验和互动原型,让人们更接近这些场景。

而且,他们研究视角也很独特。在这个项目中,人不再是通过眼睛看前方的路况,而是根据传感器和一系列数字来观察。
当人们不得不通过传感器“看世界”,并根据数据、概率和统计数据做出决策时,我们会发现什么呢?这是个有趣的问题,参加这个项目,你的体验会告诉你答案。
此外,研究者还有另一重类似科普的考虑:如何才能使用VR这样的新技术,更好地接触那些远离这些话题的受众呢,毕竟大家的发展并不总是在同一个阶段。
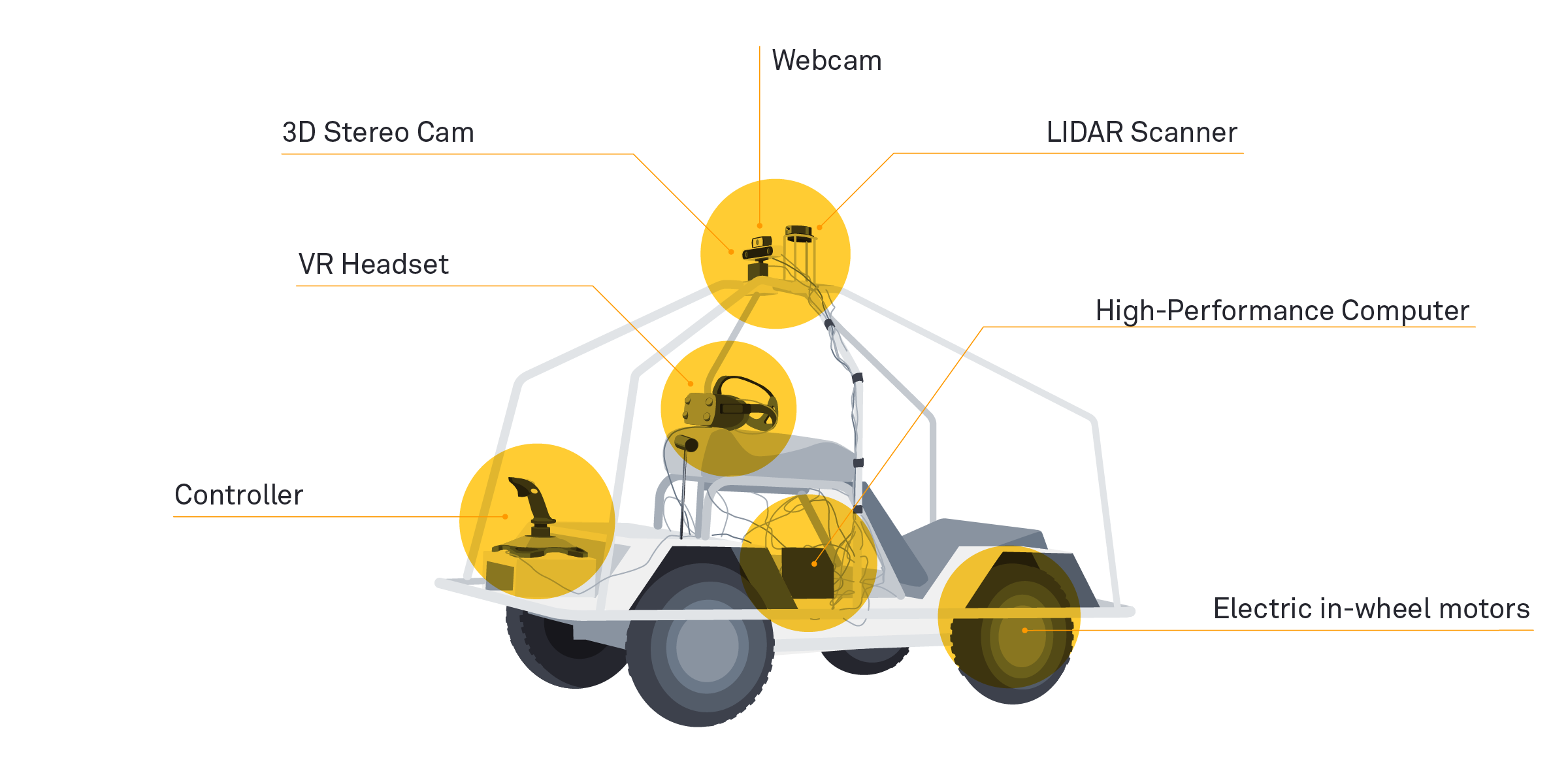
基于这些初衷,他们设计了这种简易无人车。这种无人车上,配备了一系列组件,可以让你模拟进入无人车的世界。
一名驾驶员戴着一款Oculus Rift VR设备,它可以显示从车辆传感器收集到的数据,并利用这些信息来控制车辆。通过这样,让人类有机会体验一辆自动驾驶汽车的感觉。
现在的汽车(非自动驾驶的)是交通工具,司机是驾驶员。而无人车相当于同时将驾驶员和交通工具两者合二为一,而在这个项目里,利用VR设备将两者结合在一块,可以让你体验一把同时是车又是司机的感觉。
本质上,这是一种数据驱动的信任训练,它使用VR来帮助人们理解自动驾驶汽车系统。研究人员开发了一种非传统的驱动机器,让人们可以在VR设备中使用实时、三维的地图和对象识别,从而在空间中进行导航。
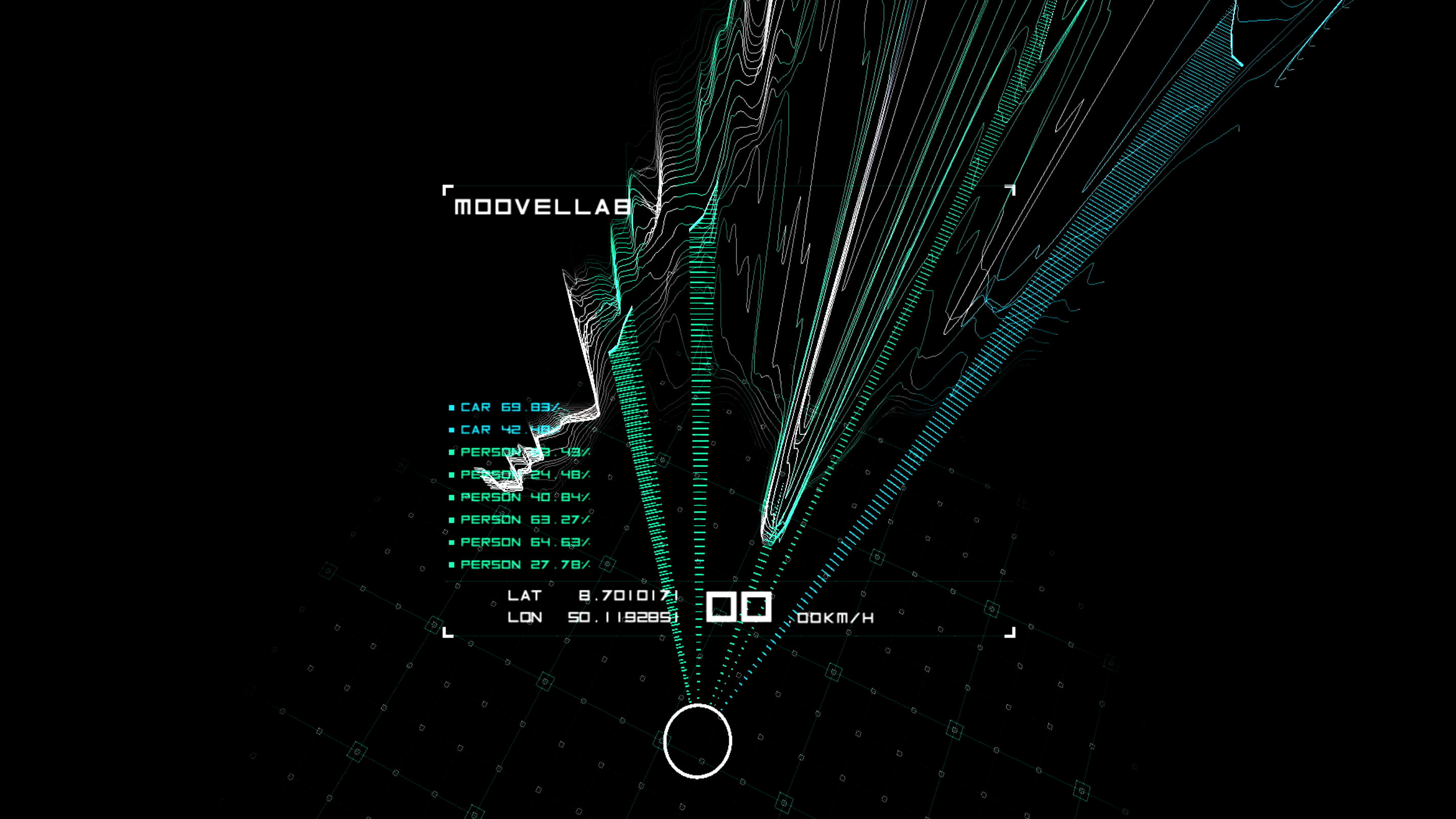
这是你在模拟无人车时会看到的景象:
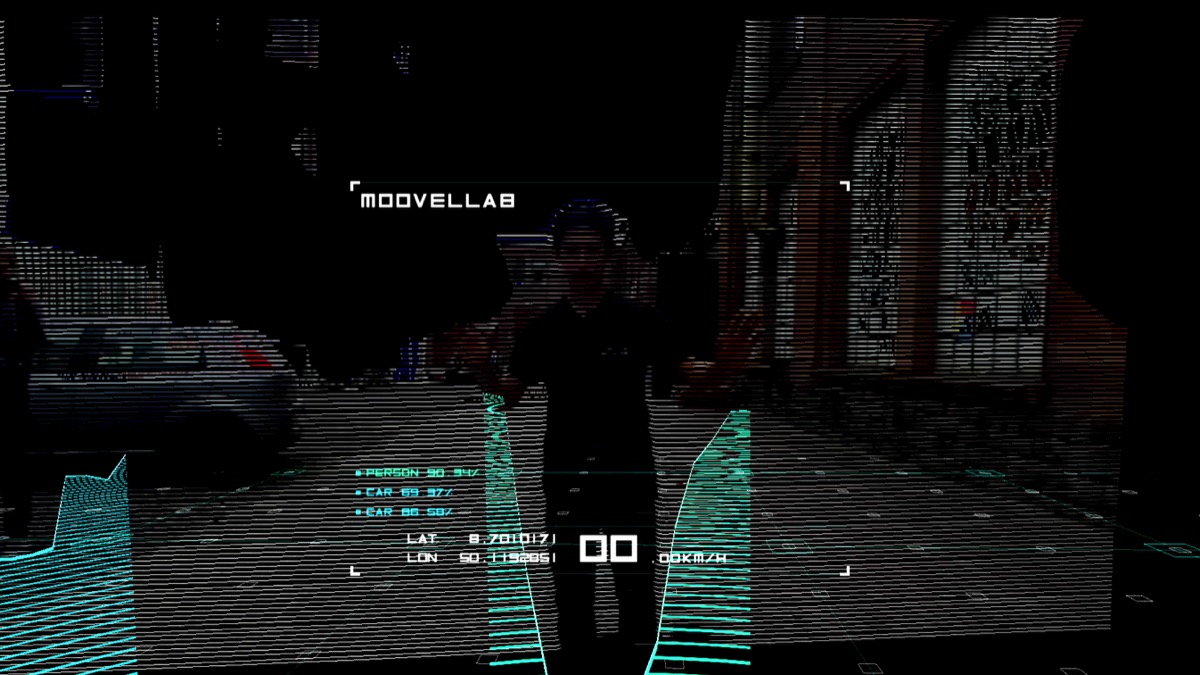
用户在佩戴VR眼镜时所看到的主要视图,是一个3D深度摄像头拍摄的,它会使用立体成像技术实时绘制景象。在车后的一个摄像头也可以让司机看到相反方向的情况,而激光雷达传感器通过反射光线来探测附近物体的距离。所有这些数据都会反馈给驱动程序,用于做出决策。
车上还有两台电脑——一台PC机和一台NVIDIA Jetson TX2。PC接收来自3D深度摄像机和激光雷达的数据,还接收了来自于Jetson TX2上面的YOLO对象检测软件检测到的物体。检测到的对象通过OSC(振荡器)发送给VVVV(一款简单原型设计和开发的图形化编程软件,可以实时动态图像、音频和视频),它将可视化的显示方式呈现,以每秒钟90次的频率。
总之呢,所有这些就是为了把你暂时“变成一辆无人车”。
如上所述,这个项目始于一个问题:“无人车是如何看待世界的?”该项目的创建者之一Joey Lee表示:“我们想知道通过传感器和数据来了解世界意味着什么。”
据Joey Lee介绍称,他们的实验室主要是通过一些项目来帮助人们,以更具体、更形象的方式来感知这些问题。他们考虑了如何将VR技术和人工智能技术结合起来,从而为这些话题创造一个更容易进入的切入点。

你猜,在这种情况下,你怎么看狗?狗又怎么看你?
当然,这和司机们看待世界的方式完全不同。人们对它作出的反应也各不相同。据Lee介绍,一些人对通过使用数据感知到环境的体验感到兴奋,而另一些人则认为这种体验过于强烈。
Lee说道:“有趣的是,在进行测试时,有些人会认为,他们造成的任何事故都可能被归咎于汽车的编程,而不是自己来承担责任。而另一些人,在配备VR头显的情况下,则会更加小心谨慎。”
不得不说,这种考虑问题和设计工具的方式还是蛮奇特的。这虽然不是什么新技术或新产品,但是这种互动原型和整体方案的设计,无疑会大大加深人们对无人车的体验。在无人车时代真正到来之前,给大众带来这种沉浸式的体验,进行感官和思维上的预热,也是挺好玩、挺有意义的。





大厂都在用的在线作图软件
包图网
- 4.2
(241)咨询产品免费试用稿定设计
- 4.0
(193)咨询产品免费试用fotor懒设计
- 4.1
(49)咨询产品免费试用



限时免费的在线作图软件
千图网
- 4.1
(293)咨询产品免费试用创客贴
- 3.9
(243)咨询产品免费试用摄图网
- 4.2
(86)咨询产品免费试用



新锐产品推荐
滴答清单
- 4.0
(54)咨询产品免费试用PolarDB
- 0.0
(0)咨询产品免费试用达梦—数据库
- 0.0
(0)咨询产品免费试用达梦—大数据
- 0.0
(0)咨询产品免费试用strikingly
- 4.0
(18)咨询产品免费试用牛刀低代码
- 0.0
(0)咨询产品免费试用







