想造出来《星际穿越》中机器人Tars,还有哪些难题?

这个叫Tars,看着像冰箱门,又像四根不锈钢筷子拼成的机器人,是《星际穿越》里人气最高的角色。主角们来到第一个星球,海啸到来时,是Tars救了安妮-海瑟薇。当主角们要解开黑洞之谜时,是Tars主动请缨。当男主进入五维空间时,唯一能跟他沟通的是Tars。也是Tars将解开引力之谜的办法,通过摩斯码告诉了男主,男主才有机会拨动女儿的手表。
看到了吧?机器人拯救世界,看起来很酷的样子,但是真的想要把Tars搬进现实,还是要面临不少问题。第一个问题是,Tars究竟要多像人!
作为人性研究专家的导演克里斯托弗-诺兰,在Tars这个机器人的设定上可没有含糊。诺兰避免了完全拟人化的设定。他认为机器人,特别是在航天航空中应用的机器人,首先要考虑的是功能性。这就是为何电影里展现了Tars的变形能力。在遭遇大海浪时,Tars的一侧变成了螺旋桨帮助其在海洋中穿梭。在另一幕基地爆炸时,Tars的一侧又多出了助推装置。在爬陡峭的山坡时,两侧的“筷子”可以像转动助力。
机器人到底需要多拟人
这是诺兰的原话:“这个影片发生在一个资源枯竭的未来,所以科学界极端依赖于军事科技那里保留下来的任何东西,在设计上,我们想做成关节式的机器人,防爆而坚不可摧,强调的是力量和功能,而不是外形。”
在接受《帝国》杂志采访时又如是说“这些机器是已经退役的军用硬件并重新用于航天事业。它会思考会说话,但是要避免电影里的机器人普遍的拟人化特征。它们由四块长条组成,图片上接缝的部分还能再分成小块,能有三种常规变形形态。”
国外的科学小组Popsci在评价诺兰选用的非拟人设定时,给出的评价是非常有趣但这样的机器人现实里没有先例。笔者认为,诺兰应该是有向库布里克电源《太空漫游2001》里大黑石致敬的意思。并且诺兰一直有设计电影内设计道具的历史,比如黑暗骑士里的蝙蝠车,不仅重新设计,还真的制造了一台。
不过回想到男主最后醒来,重建Tars时,那个将幽默度设定到75%,Tars回应:“此机器将爆炸”的哏。又可以说,诺兰在人机交互上,还是维持了机器人拟人化的设定。诺兰认为机器人要有诚实度、幽默度,也符合人性设定。加之Tars自言需要绝对服从男主的那段对话,也可以看出诺兰依然遵从了阿西莫夫的机器人三定律:
1、机器人不得伤害人,也不得见人受到伤害而袖手旁观;2、机器人应服从人的一切命令,但不得违反第一定律;3、机器人应保护自身的安全,但不得违反第一、第二定律。
这里面值得讨论的是为何现实里机器人大量采用拟人化设计,因为现有科技还不能让机器自主思考,现在的机器人做到躲避未知障碍物的能力还有限。所以将他们制造成拟人化的目的,就是——仿生。努力将机器人做到拟人或者模仿其他动物,可以让他们满足一些特定的功能:
- 像人一样与真人互动,比如机器人大赛上常见的情况:握手、抓杯子等等。
- 模仿人的行为,从而替代人工作,比如机械臂。
- 模仿动物的行为,从而达到其行动能力。比如双足机器人、四足、六足和八足机器人。
其实拟人机器人这个词语源來自法国象征主义作家维利耶-亚当于1886年出版的小说《未来的夏娃》,即Android。如果要形容那些具有高度外观的拟人机器人,会用Humanoid这个词。即便是《星球大战》里长得像垃圾桶的R2D2也是拟人机器人,也有眼睛也有鼻子和小手臂(就是电人用的那支)。
舍弃人的外表,机器人如何移动
诺兰的设计原理就是去拟人,让机器人更接近那个世界设定下该有的样子,最重要的是舍弃拟人的外表,让机器人可以变形,以适应外太空以及未知星球更多的地形。这样的设定看起来是非常合理的,毕竟《星际穿越》不是变形记刚,汽车不一定要硬变成人。
目前现实中的机器人,按照行动模式分为:固定、轮式、履带式、双足和多足。这些分类,均是按照机器人可以挑战的地形来分的。其中多足已经被狭义上看作是全地形机器人,比如笔者此前介绍过的蛛形机器人 Charlotte。多足机器人现在多用在灾难搜救上,比如坍塌的建筑物或者地震后的地形里,这些地方一般人或车辆无法进入。

Tars的四个铁条可以模拟螺旋桨、多足、轮子、钩子甚至是火箭助推器。从电影的角度来说,看起来非常合理。不过从工程上,目前即没有原型也没如此的构想。最接近诺兰设计的机器人概念来自于荷兰艺术家Theo Jansen设计的Strandbeest (Beach Beast)。在笔者看来Tars也好,还是沙滩怪兽也好l,多少有点向蒸汽朋克致敬的意思。
很多机器人一个爱好者的出发点可以是仿生或者直接借用生活里的制动装置,然后用开源的CAD软件来尝试设计,比如FreeCAD、LibreCAD或者opensCAD等。当然,如果你采购现成的机械组件,Nuke这样的仿生学开源组件都能让你的机器人即插即用。诺兰真的造了一个Tars出来,并用在了电影拍摄里。诺兰的团队用八周时间,将一个空想的机器人实现成了一个靠液压制动的人偶。控制人偶的是特摄演员欧文。
放弃完全拟人化的设定让诺兰把精力集中于Tars的功能。这样对于拍电影来说问题解决了,但是对于真正的Tars来说,下一个问题又来了他将如何具备感知世界的能力,这件事甚至比教会机器人去思考还消耗资源。
开源机器人:机器人的进化
很多在致力于制造未来智能家居的产品团队,均认为所谓“智能”将是从突出功能性向场景化转变。智能家居将不是独立存在的,不可能像手机一样,将所有功能和传感器集合在一个地方。智能家居应该是由无数个硬件和传感器组成,她们应该具备在特定场景下,感知一切环境变化,并且彼此之间可以互动沟通,从而协作完成人类的需求。
所以,如果你要造出Tars,可能外观不是最重要的,而是要让他具备“感知”能力。在这四个大铁块的内里,无数个深度摄像头、光感原件、温度感知原件,乃至那些更先进的感知机会都得融入其中。唯有在无数个人类会生活、工作和行动的场景里,部署大量的传感器,比如深度摄像头、麦克风、温度计等,才有能力将真实世界的需求,转化成计算机能够处理的数据,从而转化成机械行为。这些传感器不必都长在Tars身上,可以作为智能家居的一部分通过云和Tars同步数据。
开源机器人可以帮助实现这样的梦想。制造机器人的核心技术包含三个部分,机械、电子和软件。机械好比如人类的骨骼和肌肉,电子好比是器官和神经元,软件就是大脑。早期在美国国防部和DARPA(国防高等研究计划署,就是那个给美国大兵出增强骨骼的黑科技组织)举办的机器人挑战赛说明中,把现实中的机器人分为三种:工业机器人、遥控机器人、自主机器人。
这是一个逐级递进的关系,其中工业机器人就是机械臂等,而自主机器人就是最终的目标,也是这个世界上无数科学家目前研究的重点。自主机器人之所以能够自主,是因为它具有和工业机器人和遥控机器人不一样的大脑。人的大脑并不是一蹴而就的,而是经过了数百年的进化过程,开源机器人可以以最快速度模拟人大脑进化的过程。
电子部分,就要开始考虑软硬结合,将无数个传感器(比如关键的感知原件深度摄像头)以及嵌入式计算机(或者更具计算能力的计算机),放入机器人。在电子元件组合设计上,也有相对应的开源CAD软件,比如KiCAD、gCAD和frizing等。
而在大脑的选型上,在这个开源越来越潮流的年代, Arduino、Raspberry Pi 等等都是不二的选择。现存的很多机器人部件制造公司,甚至已经写好了对应Linux、Android等系统的万用SDK,照着要求把相关软件写进树莓派,然后把组件简单的拼起来一切就结束了。如果你觉得以上这些都看起来太复杂了,需要掌握的软件还是太多了,不如看看英特尔给的开源方案。
3D打印
2013年9月,英特尔在纽约的Maker Faire展会上,由他们唯一的未来科学家Brain David Johnson (Futurist)展示了机器人Jammy。这个身长1米的机器人完全由3D打印完成,英特尔在展会上直接公开了打印文件,任何家庭只要拥有3D打印机,然后购买英特尔的芯片组件和机械组件,这个机器人就算完成了。
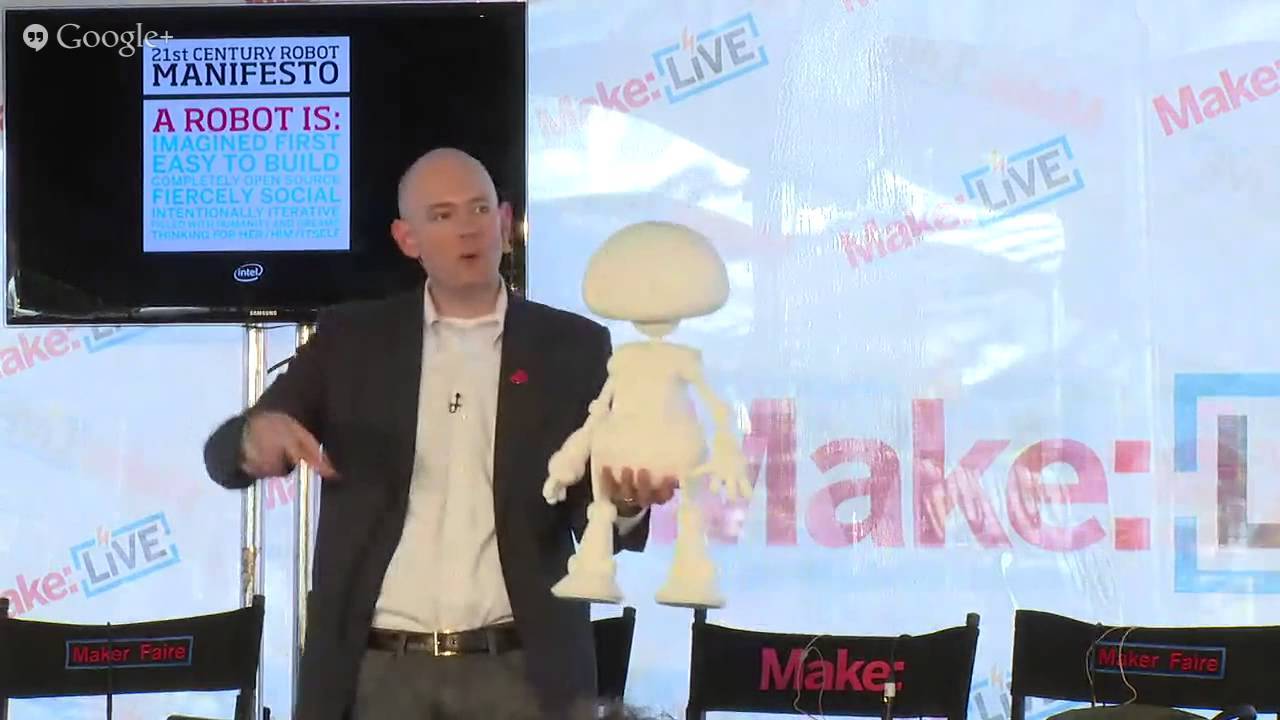
在英特尔看来,Jammy承担的任务是成为一个开发平台,任何想制造机器人的普通人,只要开发软件,就能够得到自己心仪的机器人。未来学者布莱恩认为机器人应该和手机一样,即插即用,随手可及。并且可以自定义,安装软件就可以制造不同的机器人。
想想未来的世界,人们在网上选好功能,然后挑选一个好看的机器人外观,一键将订单发给诸如英特尔这样的公司,一个机器人就会被送到家里了。
英特尔的想法一点不疯狂,在硅谷甚至是深圳,这样的事例都触手可及。一家叫 Play-i 的公司,其创始人 Mikal Greaves 曾在青蛙设计工作, Vikas Gupta 则曾是谷歌支付部门担任主管。他们制造的机器人 BO 和 Yana 本质上就是玩具,面向对象是孩子。孩子通过平板应用,就可以学着编写一些行动序列,然后机器人就会按照这些行动指令来行动,以此深入浅出的教会孩子们编程。这有点像当年学习机时代,用做游戏的方式,教小孩子VB。
如果说《星际穿越》是诺兰写给自己女儿的诗歌,所以诺兰硬是将原剧本里的儿子改为女儿。那么 Jose Julio ,则是因为他女儿喜欢游乐园里的桌上曲棍球游戏,所以用简单的原件改造出桌上曲棍球机器人,就可以看作是一次开源机器人技术在家庭里成功的开始。
Julio 的机器人全部由3D打印,核心软件则来自开源的RepRap,这一切都放在了开源的 Arduino 上。电子方面,传感器则选用的是型号为 CMUCAM5 的 Pixy 。这些都是直接对应 Arduino 的。而机器人的“眼睛”则是直接从索尼游戏机PS3上拆下来的 PS Eye 。实现原理也非常简单,在一个桌面上标注了一些特定的颜色代表轨迹或者触发机关,PS Eye会识别这些颜色,并向“大脑”传输这些数据,大脑决定机器人的行为。
看到了吗?这就是越来越接近大家的现实版机器人世界。只要你肯跟上潮流,做一个能够动,甚至互动的Tars,看起来没有那么异想天开。最后用英特尔这位唯一的未来科学家的话做个总结:
“我的工作是展望未来10~15年,拿出一个人与计算机互动的方案。”
本文作者是黎明明,运动行联合创始人,对生产未来智能家居或者家庭机器人感兴趣的互联网公司或者硬件公司,可以联系笔者,邮箱:limingming@bifenpai.com





行业专家共同推荐的软件
包图网
- 4.2
(241)咨询产品免费试用稿定设计
- 4.0
(193)咨询产品免费试用fotor懒设计
- 4.1
(49)咨询产品免费试用



限时免费的在线作图软件
千图网
- 4.1
(293)咨询产品免费试用创客贴
- 3.9
(243)咨询产品免费试用摄图网
- 4.2
(86)咨询产品免费试用



新锐产品推荐
石墨文档
- 4.0
(89)咨询产品免费试用Teambition
- 3.7
(90)咨询产品免费试用微盟微商城
- 3.8
(36)咨询产品免费试用有道云笔记
- 4.0
(73)咨询产品免费试用聚水潭erp
- 4.1
(5)咨询产品免费试用问卷星
- 3.8
(62)咨询产品免费试用







