中国首例,大脑植入电极,高位截瘫病人用意念喝水
编者按:本文来自微信公众号“智东西”(ID:zhidxcom),作者 云鹏,36氪经授权发布。
智东西1月16日消息,今日,浙江大学医学院附属第二医院发文称,我国首次实现了高位截瘫病人通过“脑机接口技术”控制机械臂,完成进食、饮水和握手等上肢运动。这标志着我国脑机接口技术在临床转化应用研究中已跻身国际前列。

据了解,该技术由浙江大学医学院附属第二医院张建民教授团队和浙江大学求是高等研究院郑筱祥教授、王跃明教授团队共同研究。该团队在高位截瘫患者脑内植入Utah阵列电极,然后用算法对电极收集到的脑神经信号进行分析,并输出机械臂可以理解的指令信号,最终实现患者的“意念操控”。
据相关资料显示,2012年,国外科学家首次通过植入式脑机接口,使瘫患病人可以操控机械手进行喝水、进食等动作。目前非入侵式脑机接口已经成为主要研究方向,外国创企NextMind今年推出的非入侵式脑机接口,已经让用户可以通过“意念”完成控制电视、玩游戏等活动。
精确手术操作,个性化算法加持

据了解,此次我国该脑机接口项目的成功主要由三个重要环节决定:微电极植入、神经信号采集分析和人机训练。
首先,用于脑机接口的电极必须要植入大脑运动皮层神经元中的第五层,丝毫偏差都会极大影响信号采集效果,并且损害其它神经。该团队利用步进为0.1毫米的手术机器人将两个微电极阵列送入既定位置,误差在0.5毫米以内。这也是全球首例成功利用手术机器人辅助方式完成的电极植入手术。
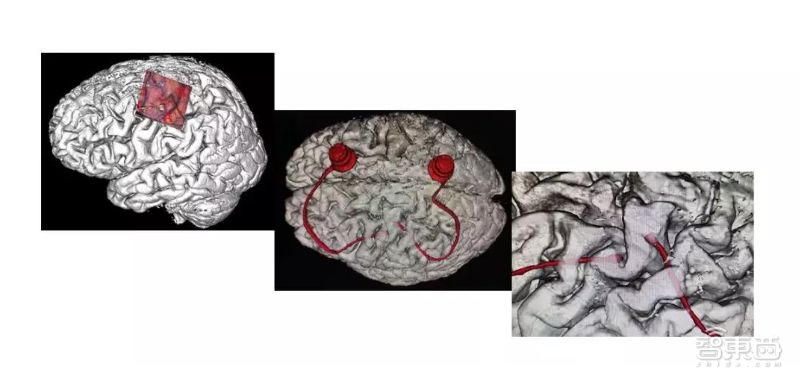
▲微电极植入示意图
其次就是脑神经信号的采集和分析。目前国际上已报道的植入式脑机接口案例中,患者均为中青年人,此次项目中的患者为老年人,脑神经信号的稳定性也有所减弱。该团队引入非线性、神经网络算法,设计了一套专门针对高龄患者的方案,最终实现了较好的脑神经信号采集和分析效果。
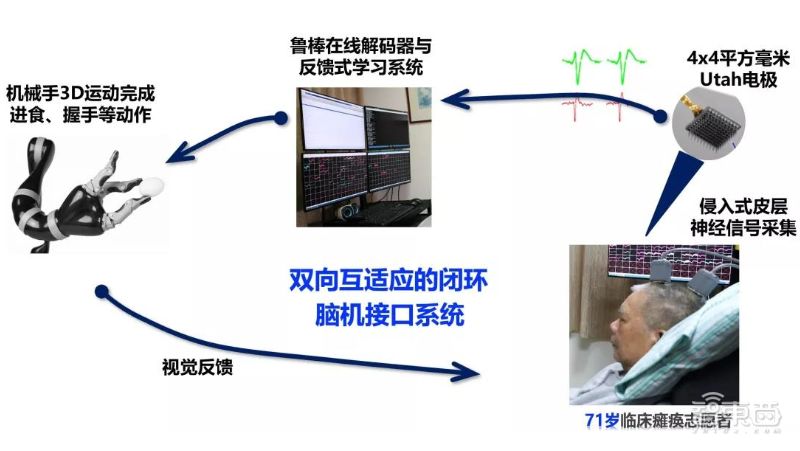
▲脑神经信号采集反馈流程示意图
最后一个关键环节是患者和机械手的磨合训练。该团队首先通过电脑屏幕上的鼠标操控训练、机械臂指定方向运动等内容进行训练,然后再模拟饮水、进食等动作。通过循序渐进的方式,历经4个月,实现了目前的成果。
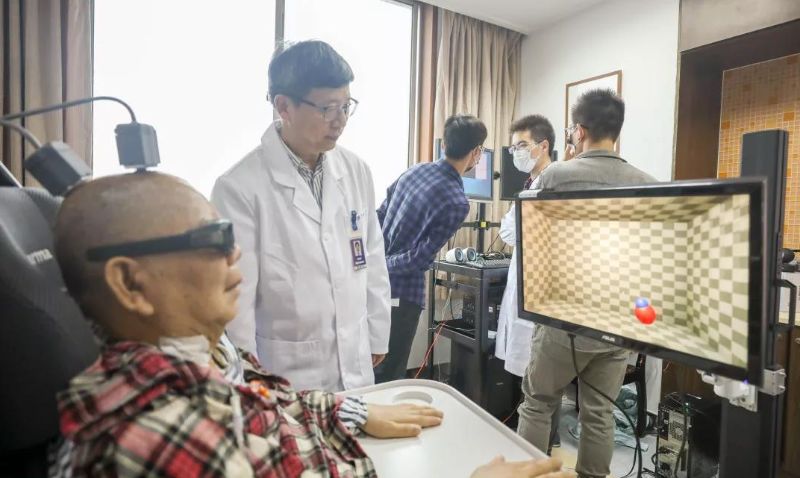
▲训练过程
历时八年,从读懂猴子到临床试验
2012年,该团队通过在猴子脑中植入微电极阵列,理解了猴子大脑中关于抓、勾、握、捏四种动作的神经信号。2014年该团队在人脑内植入皮层脑电电极,使受试者可以通过“意念”操控机械手完成“石头、剪刀、布”动作,为国内首次。
我国一直致力于脑机接口领域的相关研究,并且在国际范围内也取得了一定成果。清华大学早在2001年就实现了通过入侵式脑机接口控制鼠标、控制电视各个按键。2006年它们通过这种方式,控制两个机器狗进行了一场足球比赛。
2017年,中国科学院半导体研究所及合作研究团队提出任务相关成分分析算法,将稳态视觉诱发电位脑机接口的通讯速率进一步提升到5.4 bit/s,最优结果达到6.3 bit/s,是截至2019年8月为止,有报道的最快头皮脑电脑机接口系统。目前国内也已经广泛开展了非入侵式脑机接口的研究。
中国千万瘫患患者的福音
据了解,目前全球脑中风,脑及脊髓损伤导致肢体运动瘫痪后遗症的病人接近1亿,仅中国就有两三千万。
尽管目前入侵时脑机接口植入并非永久性的,但对于广大瘫患病人而言,脑机接口已经极大的改变了他们的生活,让他们看到了提高生活质量的希望。
结语:我国脑机接口研究迈上新台阶
此次脑机接口技术临床应用的成功,证明了我国脑机接口技术已经具备实际应用的能力,并且患者可以借助该技术完成的动作已经较为丰富,可以极大提升患者的生活质量。
脑机接口一直是全球科技界的重点研究领域,目前,非入侵式脑机接口研究逐渐成为各路科技巨头和创企的主攻方向,并且目前非入侵式脑机接口设备已经在CES 2020大会上展出。

▲Nextmind非入侵式脑机接口设备
我国脑机接口目前迈上了新的台阶,但未来还有很长的路要走。



思维导图/流程图相关的软件
MindMaster
- 3.7
(64)咨询产品免费试用亿图图示
- 3.4
(43)咨询产品免费试用ProcessOn
- 3.9
(431)咨询产品免费试用



行业专家共同推荐的软件
Xmind
- 4.0
(626)咨询产品免费试用幕布
- 3.8
(65)咨询产品免费试用万彩脑图大师
- 3.8
(21)咨询产品免费试用



限时免费的思维导图/流程图软件
坚果云思维导图
- 3.8
(23)咨询产品免费试用知犀
- 3.6
(52)咨询产品免费试用迅捷画图
- 3.6
(57)咨询产品免费试用



新锐产品推荐
Marketin MA
- 0.0
(0)咨询产品免费试用能链油站智能平台
- 0.0
(0)咨询产品免费试用Dmartech营销云
- 0.0
(0)咨询产品免费试用学加家智能教务系统
- 0.0
(0)咨询产品免费试用云杉网络DeepFlow
- 3.6
(2)咨询产品免费试用才望云
- 4.2
(43)咨询产品免费试用







