快看这个机器人,在使用双截棍,哼哼哈嘿
编者按:本文来自微信公众号“量子位”(ID:QbitAI),夏乙 编译整理,36氪经授权发布。
机器人会武术,谁也挡不住。
但是,真的有一群科研人员让机器人学会了一样兵器:双节棍。
新泽西理工大学的一组科研人员做了一只仿生手,和一只动作捕捉手套,通过人类的动作演示来教机器人使用双节棍。这项研究的论文Robot Composite Learning and the Nunchaku Flipping Challenge已经上传到了arXiv。
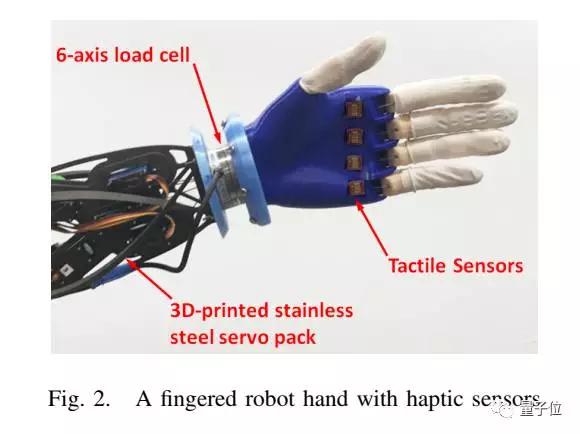
仿生手
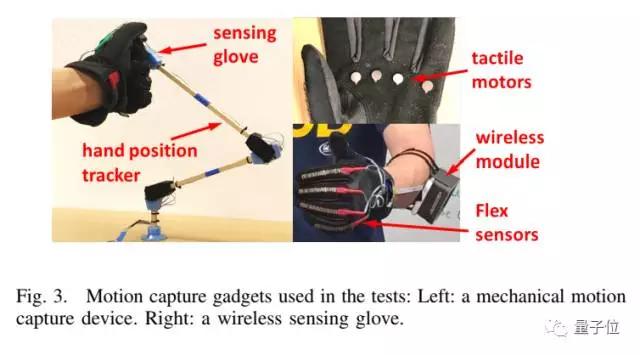
人类老师在做示范的时候,要戴上有传感器的手套来捕捉动作
这当然不是为了让机器人对你使用双截棍,而是为了研究怎样让机器人学会一套动态的复合动作。
想让机器人完成精细动作,通过人类示范学习(learning from human demonstration,LfD)是一种常用的方法。但是对“使用双截棍”这种动态技能、复合动作来说,仅仅有人类示范还不够,所以研究者们又对“教学方法”做了一点小修改。
他们教机器人学双节棍的过程,和人类的教学非常相似。
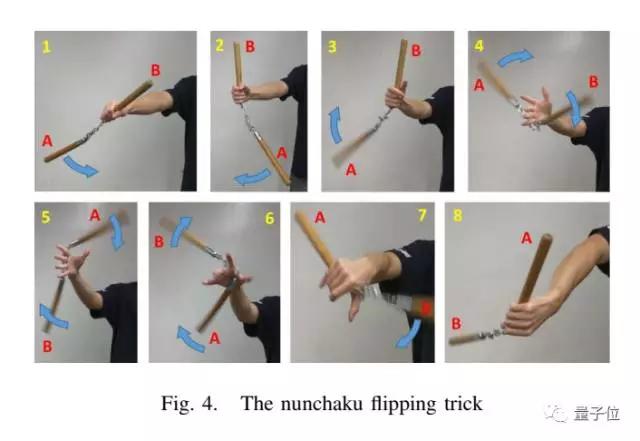
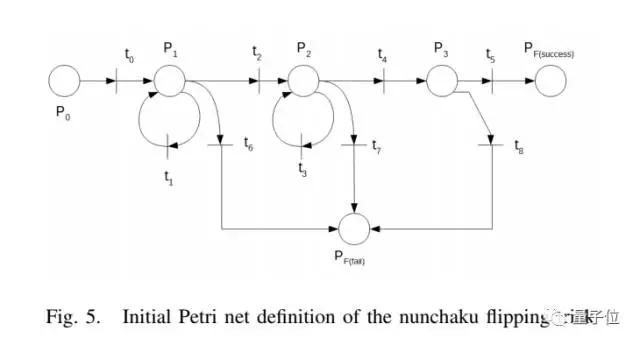
人类转双截棍的动作(上)和对应的Petri网(下)
首先,老师用一个符号化的流程图:petri网来解释一个动作;
然后,再将整个动作展示几次,每次都给自己评个分;
接下来,就需要机器人按照Petri网和示范动作一步一步学了,它在学习动作控制策略的同时,还能从老师的自我评分中学习评判标准;
最后,机器人要对自己的动作进行评判,当然,在这个阶段,人类也可以给机器人的动作打分。
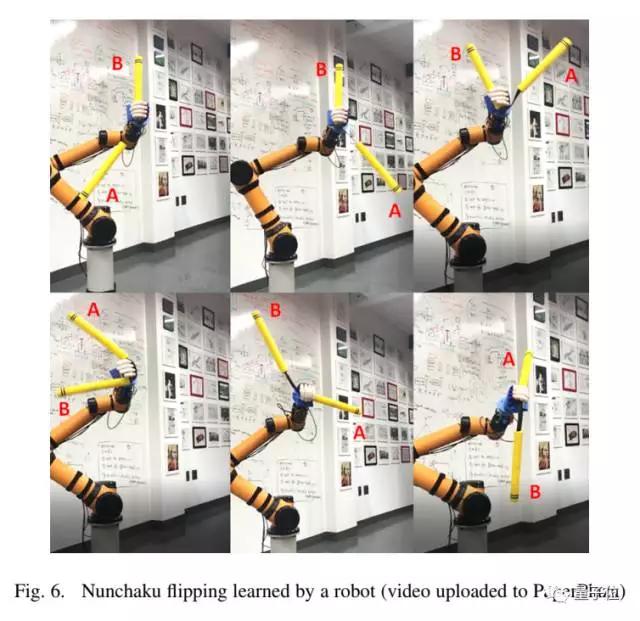
用这种方法,机器人学会将双截棍绕着手背转一圈然后抓住,也就是上图这个动作,需要大约几个小时。
好在它天生就克服了练双截棍的最大障碍:打到自己太疼了……
这项实验中所用的双截棍,是“半软半硬”物体的典型代表,这种教学方法,也同样可以用来教机器人做其他复杂动作,比如晒水果、给汽车装内饰等等。
当然也能学更复杂的双截棍技能啦,哼哼哈嘿!
论文地址:https://arxiv.org/abs/1709.03486


思维导图/流程图相关的软件
MindMaster
- 3.7
(64)咨询产品免费试用亿图图示
- 3.4
(43)咨询产品免费试用ProcessOn
- 3.9
(431)咨询产品免费试用



大厂都在用的思维导图/流程图软件
Xmind
- 4.0
(626)咨询产品免费试用幕布
- 3.8
(65)咨询产品免费试用万彩脑图大师
- 3.8
(21)咨询产品免费试用



限时免费的思维导图/流程图软件
坚果云思维导图
- 3.8
(23)咨询产品免费试用知犀
- 3.6
(52)咨询产品免费试用迅捷画图
- 3.6
(57)咨询产品免费试用



新锐产品推荐
法大大
- 3.9
(319)咨询产品免费试用石墨文档
- 4.0
(89)咨询产品免费试用Teambition
- 3.7
(90)咨询产品免费试用微盟微商城
- 3.8
(36)咨询产品免费试用有道云笔记
- 4.0
(73)咨询产品免费试用聚水潭erp
- 4.1
(5)咨询产品免费试用







