只要在平板上动动手指,你就能控制一大群小机器人
转载时间:2021.04.21(原文发布时间:2015.05.18)
396
阅读次数:396次
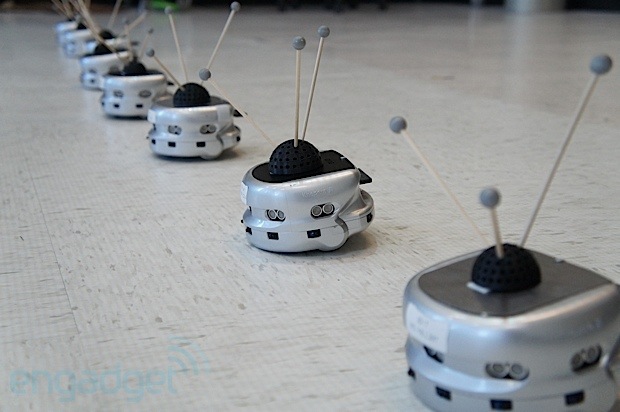
当机器人变得更小更廉价并且能做更多事情时,成群的小机器人相比于单一大机器人而言可以完成更多更复杂的任务。只是,当需要让一群机器人实现任务协作时,对每个小机器人进行编程和命令控制就显得过于麻烦。对此,来自美国乔治亚理工大学GRITS实验室提供了一种解决方案:在平板上用手指对成群机器人进行动态控制。
GRITS实验室开发了一种系统,只要用手指点击平板电脑上的区域,就可以让成群的小机器人即时改变之前设定的路线,相互协调以完成新的命令。
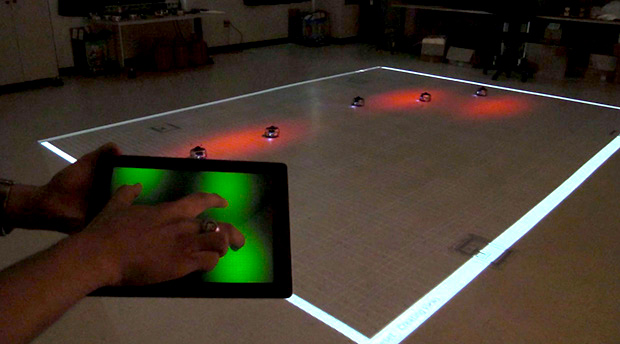
看似很简单的一个技术,其实它背后的应用场景非常广阔,比如在未来使用成群小机器人执行灾难搜索和救援任务时,只要用手指点击特定区域,机器人部队就会根据算法进行相互协作,实现最优化的路径搜索覆盖,并随时实现任务调整。在农田,农民可以利用成群机器人对农作物进行监测。在工厂,机器人们可以将仓库的货物搬运到操作员指定的任何地方。
凡是需要成群机器人协调工作的领域,无论是清洁机器人、监测机器人还是一大批无人机需要进行飞行任务安排,这样的系统都大大降低了操作难度,让更多的普通人可以实现对机器人的成群控制。



协作文档相关的软件
永中Web Office在线编辑
- 4.7
(14)咨询产品免费试用石墨文档
- 4.0
(89)咨询产品免费试用够快云库
- 4.2
(17)咨询产品免费试用



大厂都在用的协作文档软件
金山文档
- 4.0
(84)咨询产品免费试用金山数字办公平台
- 4.6
(2)咨询产品免费试用BoardMix
- 4.0
(5)咨询产品免费试用



限时免费的协作文档软件
印象团队
- 3.8
(60)咨询产品免费试用语雀空间
- 4.1
(40)咨询产品免费试用讯飞文档
- 3.8
(25)咨询产品免费试用



新锐产品推荐
建科研工程资料管理平台
- 0.0
(0)咨询产品免费试用明动-魔方(MCube)平台
- 0.0
(0)咨询产品免费试用AdsDesk
- 0.0
(0)咨询产品免费试用PractiTest
- 3.9
(40)咨询产品免费试用Avo Assure
- 4.0
(40)咨询产品免费试用Docker
- 4.1
(40)咨询产品免费试用






消息通知
咨询入驻

商务合作
