意念加AI算法「复原」每个手指,智能义肢登上Nature子刊封面
编者按:本文来自微信公众号“机器之心”(ID:almosthuman2014),作者Synced,参与:张倩、杜伟、李泽南,36氪经授权发布。
使用「意念」控制机械,让肢体缺失的残疾人过上正常人的生活,这听起来像是出现在电影中的场景。最近,瑞士洛桑联邦理工学院(EPFL)展示的新技术却让科幻变成了现实,他们的研究还登上了最新一期自然杂志子刊《Nature Machine Intelligence》的封面。
近日,瑞士洛桑联邦理工学院的研究人员开发出了一种全新的机械臂控制方法,它利用人工智能为被截肢者提供前所未有的准确操纵能力。研究人员结合了神经工程学和机器人学的专业知识,使得穿戴者可以控制机械手的每个手指,并在穿戴机械手时自动抓起物体。这项新技术在包括 3 名被截肢者和 7 名肢体健全受试者的概念验证研究中获得了成功。
换句话说,由于被截肢者的感觉和控制能力有限,他们很难保证自己的手指形状与物体相符并保证抓握力度适中,因此需要 AI 算法进行辅助来提高精确度。这种方法极大地改善了机械手的可用性,并可以灵活操作多个自由度的关节。

用 AI 算法解码「意念」
在此前,科学家们对于机械臂控制研究很多,但充其量也只能控制单个手指,而且其研究成果也仅限于在四肢健全的人群中实现离线的「义肢控制」。
EPFL 提出的新系统,在神经学上的关键理念是对来自现有运动神经的信号进行解码,这些运动神经旨在为手指发出活动的信号。这些信号(sEMG)收集自被截肢者残肢的剩余神经,并被转换成假肢单个手指的运动信号,这种效果在之前的假肢研究中未能实现。得益于机器人技术,机械手可以帮助被截肢者抓起物体并能够维持些许时间,从而以一种真实的方式操控物体。
研究者首先提出了一个使用多层感知器(MLP)的运动比例解码器,该解码器允许穿戴者同时、连续地控制每个手指。
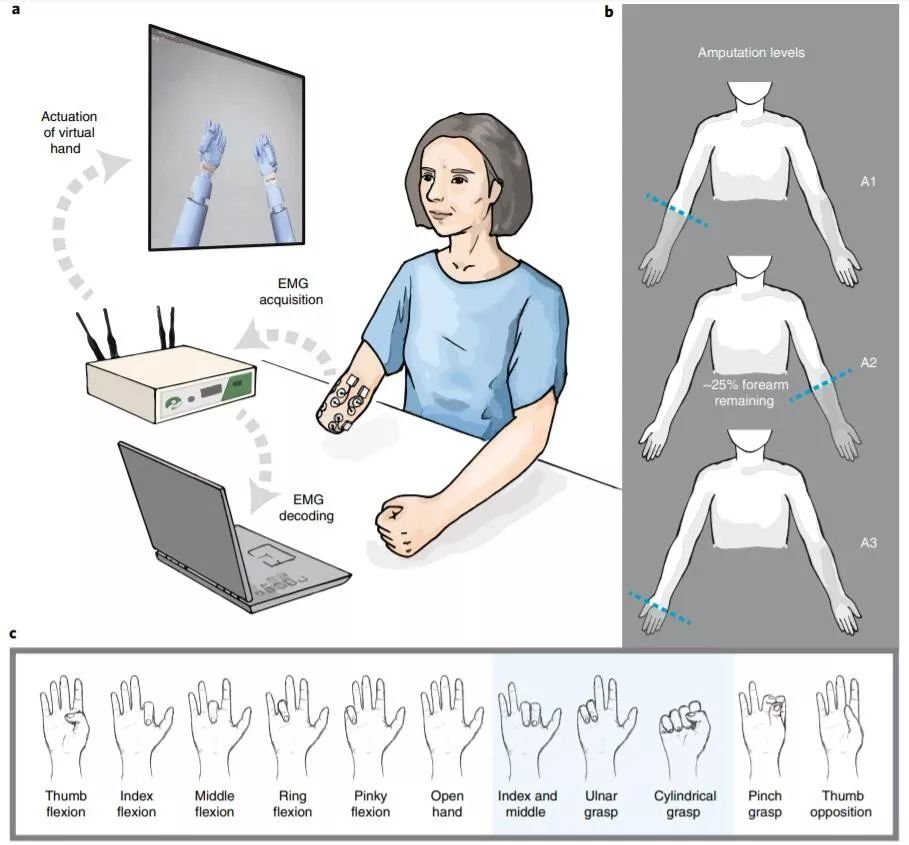
图 1:实验装置和受试者。
a:在线实验中,4 名肢体健全和 3 名截肢受试者利用他们的表面机电信号控制一个虚拟的机械手。利用多层感知器对这些信号进行解码,得到单位数关节角度的预测结果;
b:3 名截肢受试者的残缺程度不同;
c:研究人员测试的肢体活动包含单位数和多位数活动。实验结果显示,除 A2 截肢受试者无法独立做出食指和中指弯曲/延展动作之外,其他所有受试者都能做出 c 中的所有动作。

训练完成之后,被截肢者就可以将有意识的动作脉冲转换为各个假肢手指的微调动作。该算法滤掉了与肢体运功无关的动作,只关心与运动紧密相关的动作。
「由于这些肌肉信号是有噪声的,我们需要一种机器学习算法来提取有意义的肌肉活动并将其转换为动作,」论文一作 Katie Z. Zhuang 解释称。
提高抓取灵活度
然而,仅仅依靠处理人类发出的信号,我们还远不能以让机械臂做到足够灵活。对此,研究人员开发了另一种机器学习算法,用来帮助用户抓取和操纵物体。
在机械手碰到物体之后,AI 算法就会让手指闭合,抓住物体。这一自动抓取功能源自之前的研究,在这项研究中,机械手被用来感知物体的形状,并仅基于接触得到的信息实现抓取。
「当你手里拿着一个物体,它开始松脱滑动,你只有数毫秒的时间做出反应,」EPFL 学习算法与系统实验室的 Aude Billard 表示。「机器手能够在 400 毫秒内做出反应。它的手指上布满压力传感器,可以在大脑感觉到物体滑动之前做出反应并稳住物体。」
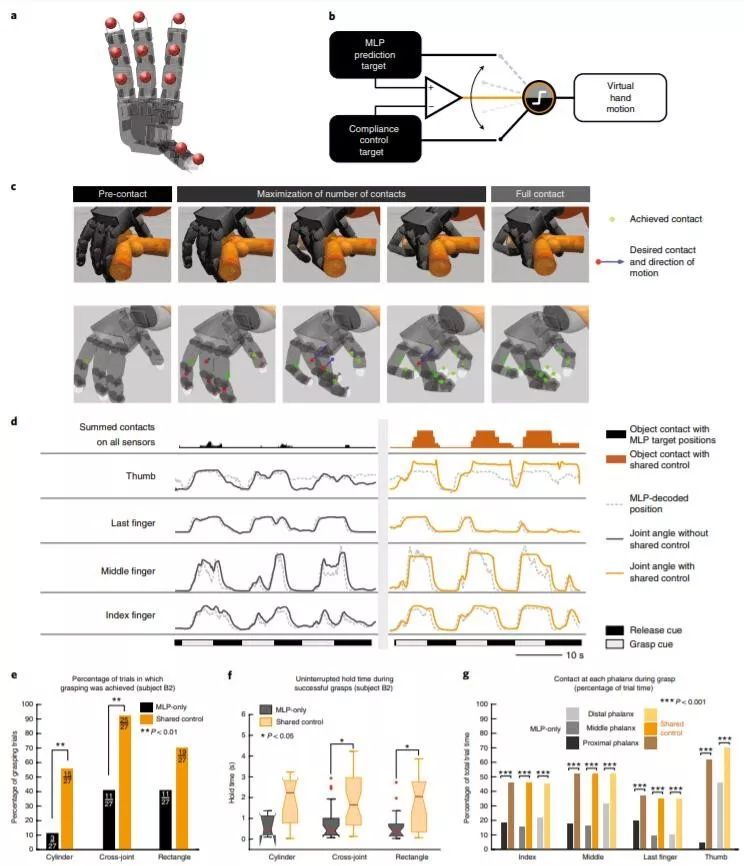
图 3:虚拟环境中的共享控制、装置和结果。
a:Allegro 机械手模拟器;b:共享控制策略。c:主动柔顺接触(共享)控制器的动作;d:共享控制的示例追踪(受试者 B4)。其中,顶部一行显示了无共享控制(左)和有共享控制(右)两种情况下检测到的总压力值;e:受试者 B2 的握持实验百分比;f:握持物体的时间维持在 7 秒;g:握持物体时远节趾骨、中节趾骨和近节指骨的接触。



AI人工智能相关的软件
来画视频
- 3.7
(41)咨询产品免费试用火眼审阅
- 3.6
(5)咨询产品免费试用火山引擎·机器学习平台
- 5.0
(1)咨询产品免费试用



行业专家共同推荐的软件
美摄科技
- 3.8
(6)咨询产品免费试用Phrase TMS
- 4.0
(40)咨询产品免费试用UbiTrack多维高精度定位系统
- 5.0
(2)咨询产品免费试用



限时免费的AI人工智能软件
Transifex
- 4.5
(40)咨询产品免费试用火龙果写作
- 5.0
(1)咨询产品免费试用Copy.ai
- 4.4
(40)咨询产品免费试用



新锐产品推荐
扬程-智能会议平板
- 0.0
(0)咨询产品免费试用仙视-Goodview会议平板
- 0.0
(0)咨询产品免费试用洲明-会议一体机
- 0.0
(0)咨询产品免费试用互视达-会议平板
- 0.0
(0)咨询产品免费试用NEC-Netrix智能交互平板
- 0.0
(0)咨询产品免费试用理光-互动电子液晶显示器
- 0.0
(0)咨询产品免费试用







