如何联通虚拟与现实,Dexta Robotics的想法是推出廉价且成熟的商品化手部动作捕捉器Dexmo
《阿凡达》里的纳美公主有没有打动过你,《霍比特人》里的Gollum(咕噜)是否惊吓到你?这些深入人心的虚拟人物,何以能有深入人心的力量?动作捕捉技术可是功不可没。不过,作为连接虚拟世界与现实世界的桥梁,专业的动作捕捉设备价格昂贵,对于普通消费者尤其是极客来说,还是既高大上又不接地气,很难应用在自己的产品和创意中。
Dexta Robotics 团队的五个年轻人,就在做机械手的过程中,发现了这个空白,做了一套手部动作捕捉器 Dexmo。
为了更清楚他们的项目和产品,我们还是先来看段视频。
这个视频是他们早期产品的合集,从上面来看,Dexta Robotics的手部动作捕捉技术已经比较流畅了。近期他们也会更新项目的进展。
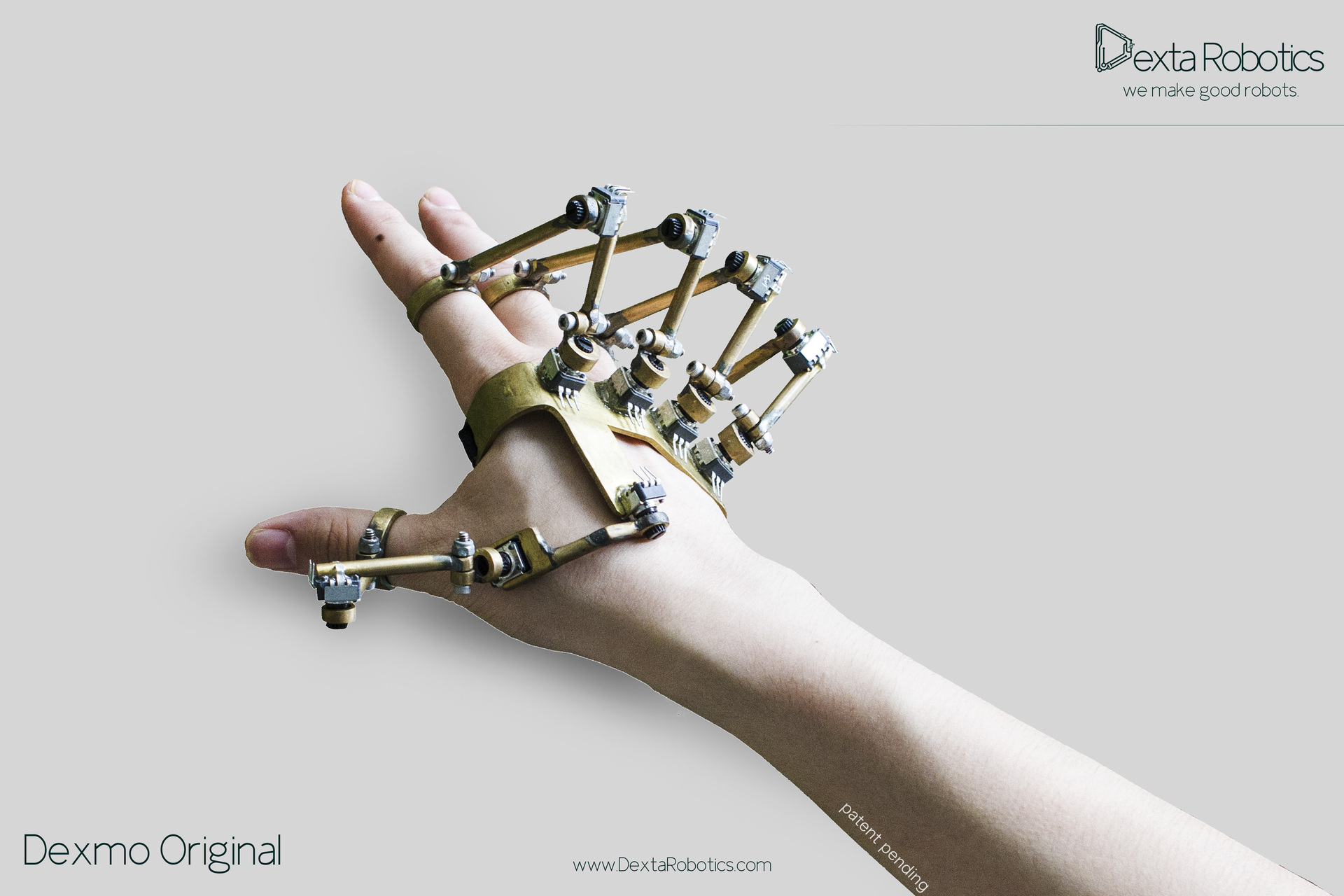
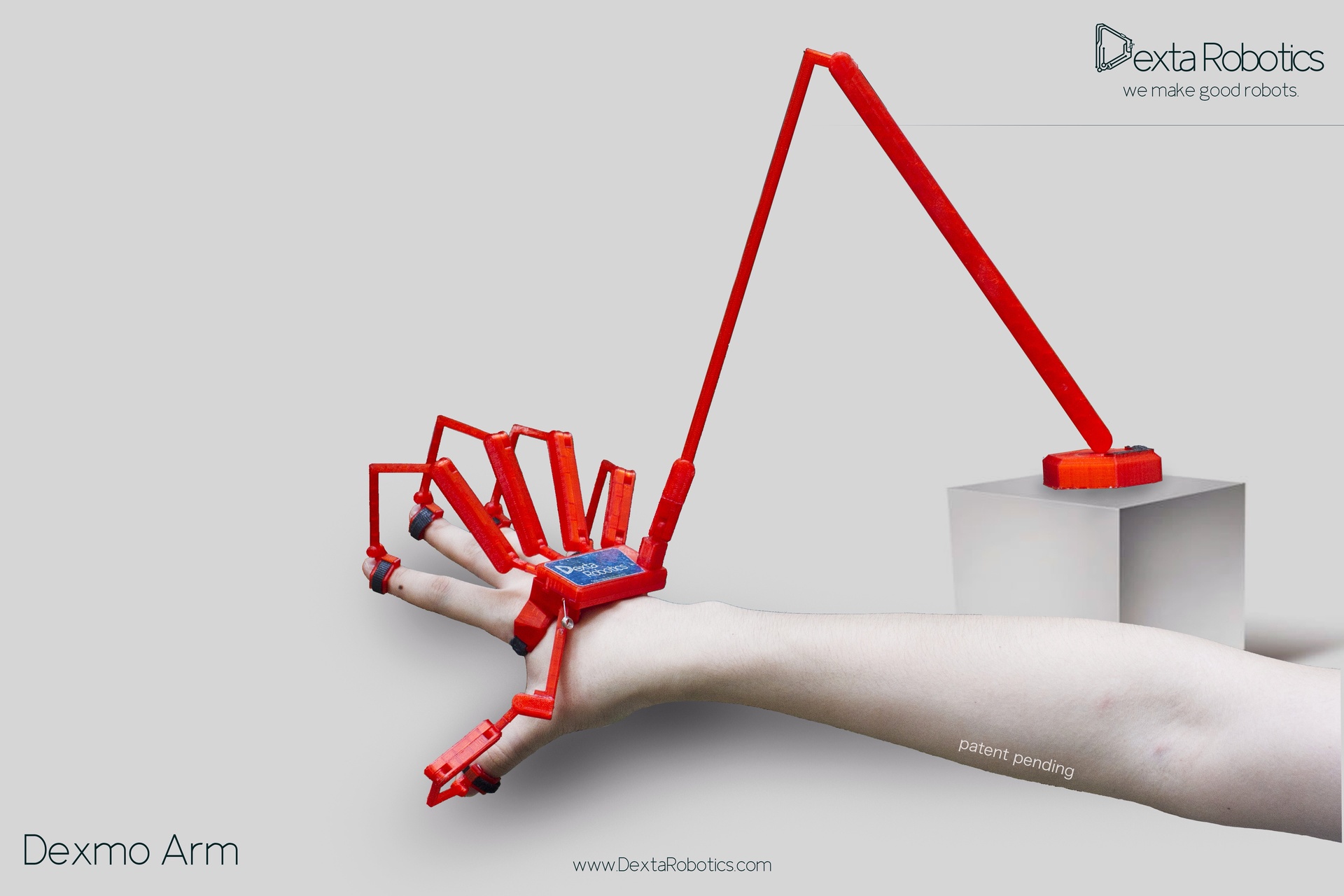
(注:上图为Dexmo Original)
市面上的商用产品化的手部动作捕捉手套(data gloves)使用的技术主要有几类:IMU(inertia measuring unit)惯性检测单元 方案、 弯曲传感器类方案、光学式方案。不过,这几类技术也有不足:一个是这类产品价格都非常昂贵,很难做到消费者级别;一个是需要添加额外的硬件来实现力反馈。
因此,Dexta Robotics采用了机械式的动作捕捉方案,做了手部外骨骼形状的Dexmo,将手部的弯曲动作通过一组连杆分解映射到旋转传感器上,计算出手部的位置和姿态,捕捉手部动作。
Dexta Robotics的创始人谷逍驰告诉36氪,之所以采用这种方案,主要是出于三个方面等考虑:
一是,机械式动作捕捉,精度较高,可以做到开机实时测量,不需要每次使用都校准。
二是,在外骨骼上添加力反馈更加容易,其他的方案几乎都是手套式的,从动的只是手套表层的布料,很难在不加入其他装置的情况下做到力反馈。
三是,这套方案下,Dexmo的设计中可以不用昂贵的传感器,使用造价相对低廉但是精准度相对较高的旋转传感器上。同时,连杆等机械部件可以通过开模等方式进行生产,量大的情况下造价可以做到很低。
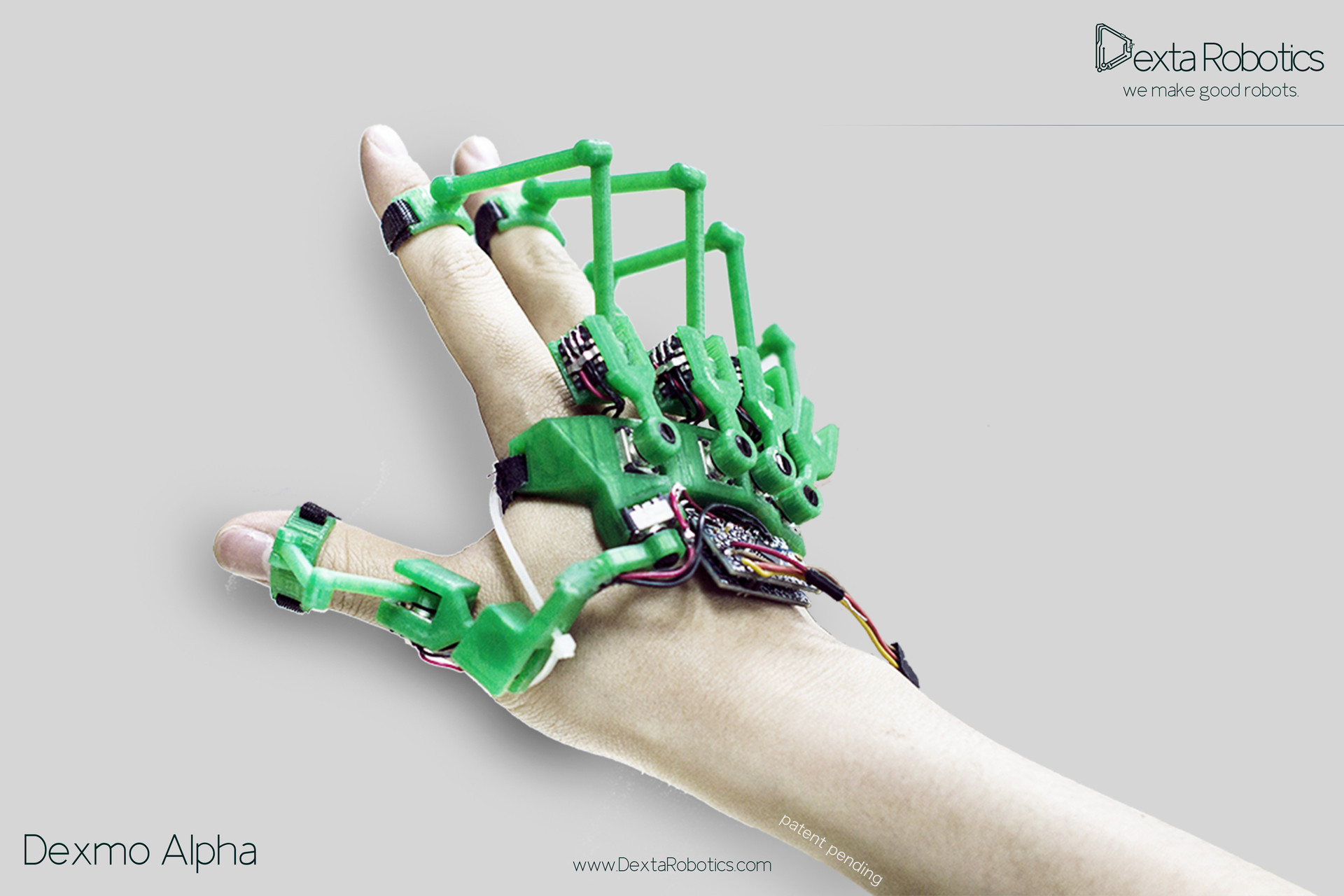
(注:这个为Dexmo Alpha)
要保证动作捕捉的精准度和流畅性,硬件只是其中的一部分,算法与模型也很重要。手部模型的构建就是其中一个重点和难点。软件对读取到等手部数据进行分析来建立一个相对精准的手部模型。Dexta Robotics通过对手指数据的进行外骨骼的正运动学建模,利用算出的坐标点进行手指的逆运动学分析。经过多次尝试,团队开发出了相对完善的手部模型重建程序。谷逍驰也认为,手部模型重建的算法和软件也是他们的主要竞争力之一。目前,他们已经在国内外申请了包括结构、算法在内的三个专利。
要做到商品化,使用的方便性也挺关键。Dexmo仅仅需要佩戴者在第一次佩戴的时候进行一次个人信息(手部大小)录入的校准,之后佩戴可以直接生成手部模型,比较方便快捷。
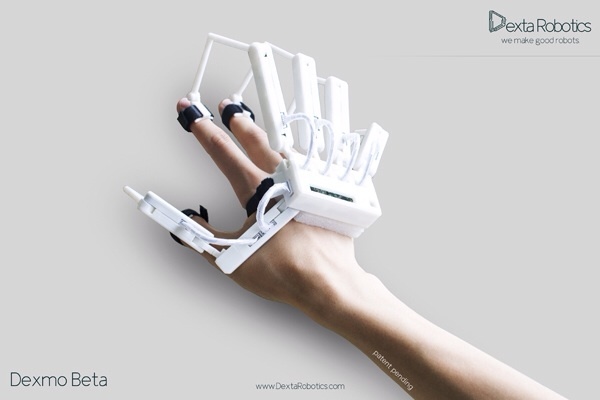
(注:这个为Dexmo Beta)
动作捕捉的精度与造价其实关联性很大,比如要将Dexmo的精度做得更高,就需要使用更高造价的传感器。而谷逍驰他们想做一套价格低廉、算法成熟稳定的消费级动作捕捉产品,所以在价格和精度之间也需要有一个平衡。谷逍驰认为,消费者级别的手部动作捕捉对精准程度的要求可能并没有那么高,研究用或者精密的机械控制可能需要相对高的精度,所以他们的产品在结构的框架不变的情况下其实会有高端和低端的不同配置。高配采用金属结构,刚性高,间隙小,同时采用非接触式角度传感器,成本相对高些但是使用寿命非常长。低配则采用注塑件做结构,相对普通的角度传感器,可以实现消费者级别的手部捕捉,造价会比现有的手部捕捉方案都低。
关于Dexmo的价格,谷逍驰表示这个暂时还不方便透露,但是会比现有的同类产品价格要低。从我个人的角度来看,像Noitom的挪腾现在正在Kickstarter众筹,最低等支出价格也是在200美元。Dexmo未来登陆Kickstarter时的价格如果在200美元以上,竞争力很可能会受到影响。
(注:上图为专门为控制机械手而设计的空间定位系统,可活动空间范围相对较小,更适合精准的机器人控制;不会作为虚拟现实设备的方案)
我觉得,Dexta Robotics团队的创业经历,其实很有意思。不过,他们并不愿意过多的提起,谷 逍驰说,“我们是很认真的在做这个公司,希望能先把事情做好,其他还是等以后kickstarter项目成功之后再说吧。”对此,我们也表示理解。所以,暂时也只把我们聊到的一些有关产品和项目的内容整理出来。
36氪:产品现在的进展如何?
谷:我们的产品是从去年9月份开始开发,今年3月16日建立了团队。我们团队目前有五个人,其他四个小伙伴分别是:张逸飞(I.F.),孙维泽(Sunny),卞远哲(Rijn),马安南(MAN)。因为公司小,所以几乎每个人都需要身兼数职。5个人要做机械工程师、结构工程师、嵌入式工程师、算法工程师、软件工程师、平面设计师、摄影师、视频编辑、网站前端后端、运营销售等全部的工作。
近期我们在美国成立了公司。产品的前期研发一直集中在硬件本身,因为市场此前上没有过外骨骼结构的手部动作检测,所以硬件结构的更改和迭代花了比较长的时间,都是我们团队自主研发的。目前产品的开发重心已经转移到了软件算法上。
硬件方面我们目前也在同步完善微型化力反馈装置的开发,并且尽量将其价格定的更加亲民,让更多人能体验到虚拟现实和机器人的乐趣。近期我们将产品放上kickstarter,进行小规模的试产试销。
36氪:做这个项目的过程中,你们遇到了哪些困难?
谷:困难肯定有,不会一帆风顺的。一般都是技术问题,有困难就去解决嘛,解决以后其实也记不太清楚有什么了。 记得当时对力反馈如何做的更加小型化有过比较长的一段探索期,主要限制在制动器的体积和传动方式上。驱动器方面我们专门拜访了东莞资深的舵机厂家Kpower,咨询了关于低价小型化驱动器制造的可行性和价格,以及如何在两者间找到平衡。
36氪:产品等供应链管理现在进展如何?
谷:生产方面,从零件数量上来说,Dexmo确实比较复杂,但Dexmo有许多重复零件,并且零件体积都相对比较小,可以将多个零件放入一个模具中生产,所以在生产方面问题不会太大。其实关于生产我们一直很注重,与做科研不一样,设计出一个产品,就一定要能生产出来。所以我们在设计期间就咨询了一些模具厂商和有模具设计从业经验的人,这里要感谢SeeedStudio和融一的工程师们所提的建议,多次修改零件结构,最后将Dexmo的零件做的易于注塑。
36氪:Dexmo未来会如何与虚拟现实技术结合,如何与VR公司合作?
谷:我们打算在今年九月参与Oculus开发者集会的Oculus Connect,接触美国的VR行业的从业者和开发者,同时也现场展示下Dexmo,收集一些初期反馈。目前VR行业在美国发展更加迅速,为了方便与其他VR厂商以及VR开发者的对接,我们也在美国注册了公司。
36氪:Dexmo与国内动作捕捉的团队是如何合作的?
谷:目前,我们的两个合作伙伴,一个是X-immerse,是做光学手部空间定位以及虚拟现实操作系统的,还有国内做IMU动作捕捉的权威Noitom。具体的合作目前还不好透露,反正简单的说目标都是让更多的人能体验到更成熟低价的机器人控制以及虚拟现实设备。我们也希望能够和更多业内人士接触、合作。有兴趣的公司和个人可以发邮件给我们,我们的邮箱是dexta@dextarobotics.com。


AI人工智能相关的软件
来画视频
- 3.7
(41)咨询产品免费试用火眼审阅
- 3.6
(5)咨询产品免费试用火山引擎·机器学习平台
- 5.0
(1)咨询产品免费试用



大厂都在用的AI人工智能软件
美摄科技
- 3.8
(6)咨询产品免费试用Phrase TMS
- 4.0
(40)咨询产品免费试用UbiTrack多维高精度定位系统
- 5.0
(2)咨询产品免费试用



限时免费的AI人工智能软件
Transifex
- 4.5
(40)咨询产品免费试用火龙果写作
- 5.0
(1)咨询产品免费试用Copy.ai
- 4.4
(40)咨询产品免费试用



新锐产品推荐
七牛云-视频直播
- 3.6
(30)咨询产品免费试用百家云-企业直播云
- 3.7
(44)咨询产品免费试用又拍云-UPLive
- 3.6
(12)咨询产品免费试用薪丞相
- 4.0
(2)咨询产品免费试用灵云
- 0.0
(0)咨询产品免费试用全程云CRM
- 4.0
(9)咨询产品免费试用







