下次消防救援,能让它们上吗?
其实消防领域引入机器人是大势所趋。
之前在荷兰代尔夫特理工大学的组里,他们做的一个欧盟的项目 TRADR 的背景就是人和机器人共同参加工业厂房事故的救援活动(类似天津事故这类突发灾难)。该项目为期四年,2013 年 11 月~2017 年 12 月。该项目主要侧重于以下七个方面:一致性感知建模、一致性行动建模、一致性分布式信息共享建模、一致性多机器人协作建模、一致性人与机器人协作建模、系统架构和整合、用户需求分析和评估。
项目描述中强调了“一致性”(persistent),意在说明救援需要很多天,由多人和多机器人协作完成。本文就不详细介绍该项目的具体细节了,感兴趣的读者可以浏览 TRADR 的网站,并阅读相关的文献。本文主要从三个方面粗略的介绍使用机器人救灾的难点:
1. 机器人硬件。真正能完全替代人类的应该是人形机器人(humanoids),因为人形机器人的形态更能适应人类设计的环境。当然,如果有坍塌和损毁的环境,也许人和人形机器人都不方便进入。这种情况下,其他形态的机器人会比较合适一些(比如消防车机器人,履带式机器人,蛇形机器人,无人机等等)。本文主要讲述人形机器人。
小贴士:中文“机器人”这个词带有一个“人”字,但并不意味着机器人必须是人形的。这听起来好像有点纠结……广义来说,机器人必须有传感器(比如摄像头,触摸屏,麦克风)来感知环境,并且必须能通过行动(比如移动,抓取物体,说话)来作用于环境。理想情况下的智能机器人应该能够自主的做决策,即根据环境的情况做出让人类满意的正确行动(不要伤害人类或者添乱啊啊啊)。然而,这并不容易,或者说是相当难。所以,大多数情况下,机器人还是得由人远程控制,即由人类来决定机器人下一步的行动。
关于人形机器人,DARPA 搞的机器人挑战赛(Home | DRC Finals)里有一些先进的范例,比如 Atlas 机器人。下面的图片是 2015 年 DRC 挑战赛第二名 IHMC 组的 Atlas 机器人(之所以选这个例子是因为我恰好听过该组成员的的现场报告):
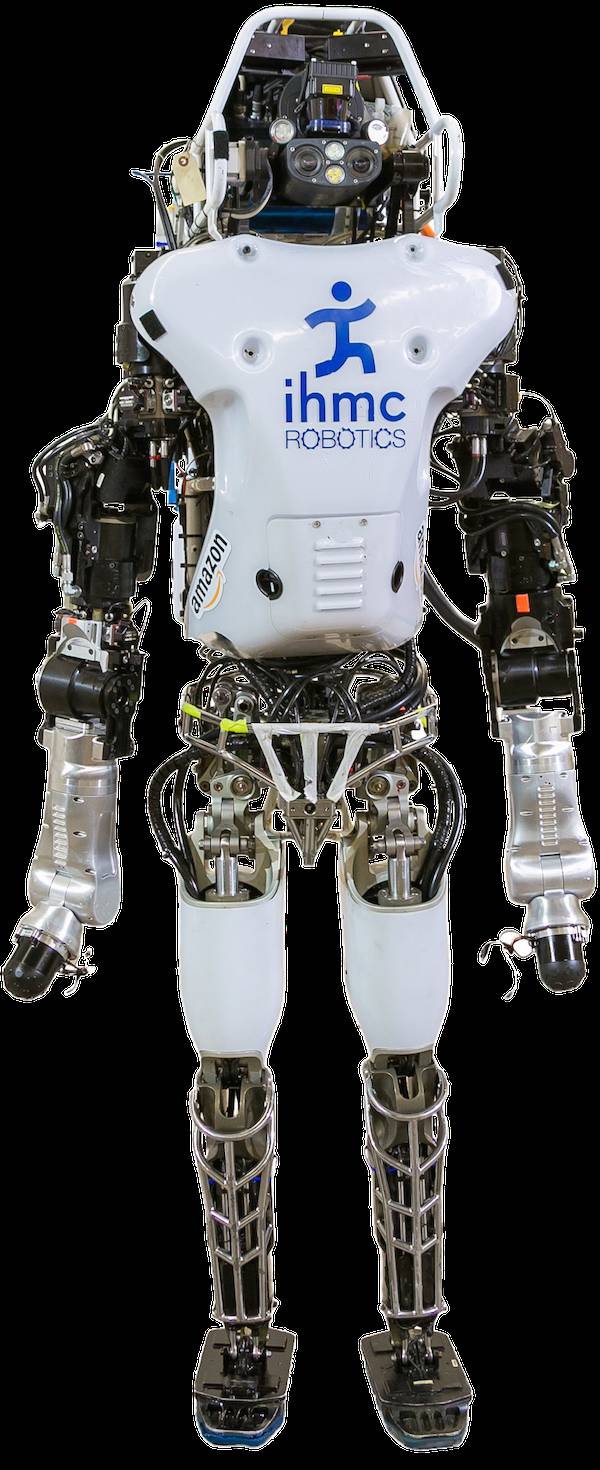
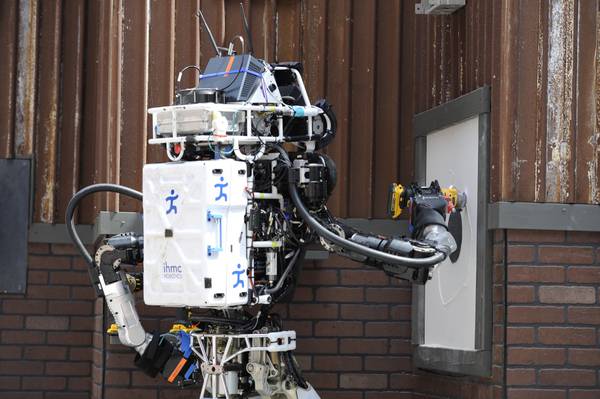
Atlas 机器人的个头儿和精壮男丁差不多,下面的图片是让机器人使用电钻把墙板凿开:
下面的图片是人形机器人开车(这和通常意义上的“无人驾驶”还是很不一样的,这里更侧重人形机器人对真实物体的操控能力):

类似的任务还有人形机器人在废墟中平稳行走,上下楼梯,组装消防水龙头,打开水阀,开门,清除坍塌路障,插上电源插头等等。先来一段视频,大家随意感受一下机器人是如何完成上述任务的:DARPA 机器人挑战赛冠军韩国队备赛视频。然后,高能预警,大家再感受一下万恶的波士顿动力实验室(Boston Dynamics,已被 Google 收购) 的最新进展视频剪辑:波士顿动力野外测试 Atlas 人形机器人 。
但是,Atlas 机器人的造价很高,目前还处于测试阶段。百十来公斤的机器人出点故障,罢个工啥的其实都很正常,如果不加以控制和保护的话,机器人歇菜了肿么办?所以现在也不要指望这货立刻能参与救灾活动。不过在可预见的将来,应该有望实现。主要还是成本问题。
注:有网友提到,机器人是否可以冲进火灾现场将伤员救出来?这个问题很好。虽然目前的机器人还不能实现这个任务,但是我相信会有可行的解决方案。还有网友提到,机器人的零件在火灾环境中可能会失效。这些都确实是硬件上的难题,不过都是有望解决的,同样是成本问题。
2.机器人相关的软件。比如导航和定位(SLAM),物体识别(object recognition),物体操控(object manipulation),远程控制(remote control)等等,都是一些难点。尤其是对人类环境的识别和应急处理,都是机器人较难胜任的。相对而言 Atlas 机器人还是比较有望完成这些任务,但还需要一些时日。以上视频已经展现了人形机器人在现阶段的能力,即能够初步正确操控人类环境中的物品(门、电钻、阀门、楼梯等)。
然而,这些设定的环境差不多都是已知的;对于完全未知环境(尤其是不断变化的动态环境),机器人的自主决策能力就显得尤为重要。尤其是在情况紧急之时,人来不及决策或不知如何决策,甚至当机器人和人失联的时候。这个自主决策能力也是制约机器人智能化的关键所在。有时候甚至需要机器人临时自主学习,自行解决问题。比如如何打开一扇从来没有见过的门,如何穿越一片不规则的废墟之类的。
3.人与机器人的(长期)团队协作。这一点非常重要,但是经常被忽略。机器人专家比较关注底层的硬件和软件,但是却经常忽视了用户(消防员,指挥员等)的上层需求。机器人专家们通常很得意于自己的杰作,身为理工科博士我深表理解。然并卵,用户真的觉得机器人用起来得心应手吗?用户眼中什么样的机器人和人机协作软件最好用?你们造机器人和编程序之前有问过用户吗?这涉及到以人为中心的设计理念(human-centered design)。
在 TRADR 项目中,同事们会去和消防员沟通,询问他们的需求,并让他们使用软件来控制机器人。用户的反馈往往和技术人员的期待不大相同。从而还需要根据用户的需求和评估报告不断更改软硬件设计。
此外,如果救灾场景很复杂,则会牵涉到很多人员和很多机器人,这又涉及到任务分配和多人 / 机器人协同的问题,即所谓的 HART (Human-Agent-Robot-Teamwork)。与之相关的 Multi-agent 的研究也是很活跃,但是大多停留在仿真阶段。实体机器人仍需大量的现场实验才能在真正的救灾场景中有所作用。这里就不展开相关细节了。
最后,人与机器人的长期协作(long-term human-robot teamwork)又是一大难点。在此也不展开细节了。
相信有朝一日,机器人可以肩负起救灾的重任,减少无谓的人员伤亡。还需有关部门合理计划,把钱花在刀刃上。
本文转自知乎,作者@Gunner Wang,【啤博士】成员,精酿/自酿啤酒爱好者,已获授权。
投稿请发tips@36kr.com,点击查看投稿细则。






大厂都在用的项目协作平台软件
Teambition
- 3.7
(90)咨询产品免费试用明雀
- 4.0
(4)咨询产品免费试用Trello
- 4.0
(55)咨询产品免费试用



限时免费的项目协作平台软件
飞项
- 3.5
(30)咨询产品免费试用泛微·事井然
- 5.0
(1)咨询产品免费试用微软sharepoint
- 3.9
(74)咨询产品免费试用



新锐产品推荐
Galileo AI
- 0.0
(0)咨询产品免费试用illostrationAI
- 0.0
(0)咨询产品免费试用即时AI
- 0.0
(0)咨询产品免费试用Spline AI
- 0.0
(0)咨询产品免费试用Uizard
- 0.0
(0)咨询产品免费试用Luma AI
- 0.0
(0)咨询产品免费试用







