步长?填充?池化?教你从读懂词语开始了解计算机视觉识别最火模型
大数据文摘作品,编译 | 马卓群,元元,keiko,钱天培
在上周,我们为大家带来了一篇卷积神经网络的入门介绍:《卷积?神经?网络?教你从读懂词语开始了解计算机视觉识别最火模型 | CNN入门手册(上)》,相信大家已经对卷积神经网络有了初步的了解。这周,我们将更深入地介绍卷积神经网络(以下简称“ConvNets”),解释上周我们提到却又没有细讲的一些概念 。
声明:我在这部分介绍的一些主题非常复杂,完全可以单独列出来写成一篇文章。为了在保证内容全面性的同时,保持文章的简洁明了,我会提供原研究论文的链接供大家参考,这些论文对我讨论的主题有更详细的解释。
首先,让我们回过头来看看我们的之前介绍的卷积层。还记得过滤器,感受域,卷积吗?如果不记得的话,请回顾本系列的上集《卷积?神经?网络?教你从读懂词语开始了解计算机视觉识别最火模型 | CNN入门手册(上)》。
现在,我们可以通过改变2个主要参数来修改每个层的表现行为。在选择过滤器的尺寸后,还要选择步长和填充。
步长控制着过滤器如何对输入量进行卷积。在第一部分的例子中,过滤器是通过一次移动一个单位来对输入量进行卷积的,而这个器移动单位就是步长。(在这种情况下,步长即为1。)我们通常选择的步长会确保输出量是整数,而非分数。让我们看一个例子,想象我们有一个7×7的输入量,一个3×3的过滤器(为了更加简明,这里我们忽略第三维度),步长为1。这是情况相信大家已经很熟悉了。
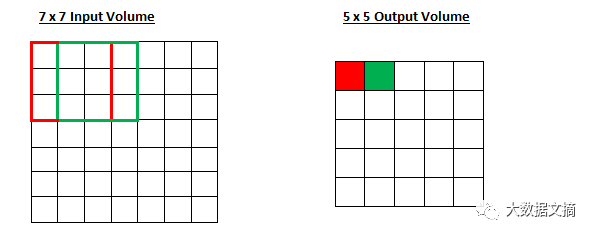
老一套,对吧?看看你是否能猜出,随着步长增加到2,输出量将会发生什么变化。
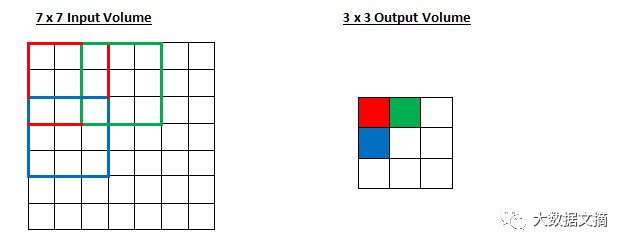
图为步长为2时卷积的输出情况
所以,正如你所看到的,感受域现在一次移动了2个单位,输出量也缩小了。请注意,如果我们试图将步长设为3,当我们进行到最后一行/列,我们就会遇到感受域无法与输入量完全重叠、有空白余留的问题。通常,如果希望在感受域有更少地重叠、保持较小的空间维度,程序员们就会增加步长。
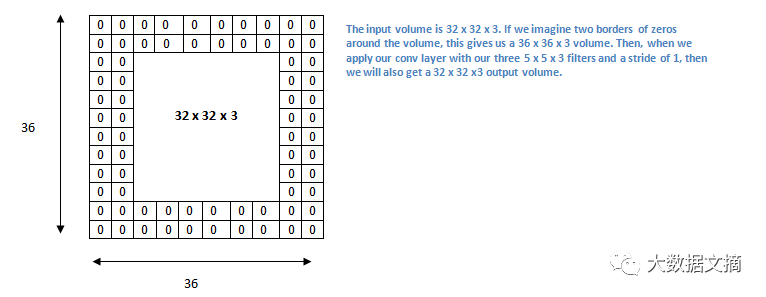
现在,让我们看看填充。在开始之前,让我们先想一个场景。当你把三个5×5×3个过滤器应用到一个32×32×3输入量时会发生什么?输出量将会是28×28×3。请注意,空间维度会减少。当我们继续应用卷积层的时候,量的大小将减少得比我们想像的更快。在学习网络的早期层中,我们希望最大化地保存原始输入卷的信息,以便我们提取那些低层次的特征。比如说我们要运用同样的卷积层,但同时我们想要让输出量保持在32 x 32 x 3。要做到这一点,我们可以对该层加一个大小为2的零填充。零填充就是对输入量在边界上用零进行填充。如果我们考虑2个零填充,那么我们就有了一个36×36×3的输入量。


其中,K是过滤器大小,那么输入量和输出量将始终保持相同的空间维度。
对于任何一个定卷积层,输出尺寸的计算公式如下:

其中,O是输出量的高度/长度,W是输入量的高度/长度,K是过滤器的大小,P是填充大小,S是步长。
选择超级变量
那么,我们要怎么知道应该用多少神经网络层、其中有多少卷积层、过滤器的尺寸是什么,以及步长和填充的值是多少呢?这些都不是无关紧要的问题,但也没有一套公认的标准。这是因为网络的选取将在很大程度上依赖于您所拥有的数据类型。数据会因为图像的大小、复杂度、图像处理任务的类型不同而变化。当你分析数据的时候,一个选择超参数的方式就是,寻找能创造出图像抽象的合适尺寸组合。
修正先行单元层(ReLU)
根据传统惯例,在每个卷积层后,我们会紧跟着应用一个非线性层(或激化层)。没有这个非线性转化,整个系统基本上就是在卷积层中进行线性操作(只是元素频繁的的乘法和加法)。在过去,我们通常使用的是非线性函数,比如tanh 函数和sigmoid函数,但研究人员发现ReLU层在不牺牲精确度的前提下加快网络的训练速度,从而带来更好的运作效果。同时,它也有助于缓解梯度消失问题。这个问题指的是,在经过每一层后,梯度会指数性地递减,因而低层的网络训练会变得非常慢。(对这个问题的详细解释已超出了这篇文章范围,如果想看进一步的解释,请参照链接1、链接2
ReLU层将函数f(x)= max(0,x)应用于所有的输入值。基本上,这一层就是把所有的负激活变为0。这一层提高了模型中的非线性特性和整个网络,并且不影响感受野的卷积层。
这篇由伟大的Geoffrey Hinton而著(又名深度学习之父)的文章更详细的阐释了ReLu的优点。
池化层
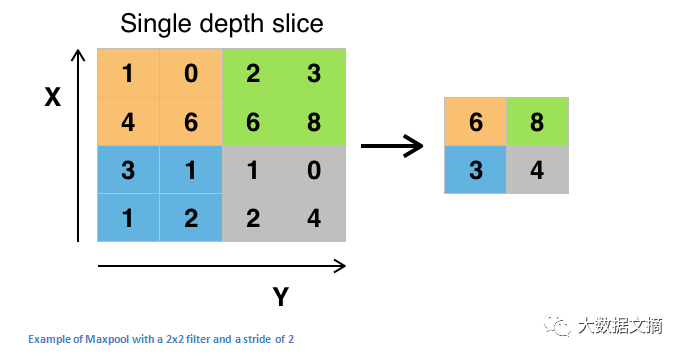
在应用了一些ReLU层之后,程序员可以选择应用池化层。它也被称为向下采样层(downsampling layer)。在不同池化层中,最大值池化(maxpooling)是最受欢迎的。先用一个过滤器(通常大小2x2)和一个相同长度的步长。将其应用于输入量,然后在每一个分区输出最大数字 。
过度拟合这个术语指的是,一个模型过于贴近训练示例,而导致不能很好地拟合验证集和测试集。过度拟合的一个典型症状就是,训练好的一个模型在训练集上可以达到100% 或 99% 拟合,而在测试集上却只能达到50%
丢弃层
现在来看看丢弃层。丢弃层对于神经网络而言有特殊作用 。在上一个部分,我们讨论了过度拟合的问题,即训练之后神经网络的权重参数过于贴近训练示例,以至于在新示例上的表现欠佳。丢弃层的想法本质上是很简单的。在这一层随机把几个激发点设置为零,从而“丢弃”他们,如此而已。这样一个看起来不必要而反常的简单过程有什么好处呢?一方面,这个过程促使神经网络变得“冗余”。这里冗余的意思是指,即使神经网络失去了一些激发点,还是能够提供正确的分类结论或者输出特定的示例。另一方面也确保神经网络没有过度拟合训练集,从而减轻过度拟合的问题。这里重点强调一下,丢弃层只是在训练过程中出现,而并不在测试过程中出现。
更多信息请参见Geoffrey Hinton 所著相关文献。
网中网层
网中网层是指一个采用1x1过滤器的卷积层。乍一看你可能会有疑问,感受域的范围通常要大过输出值的特征图,那么网中网究竟有什么作用呢?回想一下,这些1x1的卷积是有一定深度的,我们可以把它设想为1x1xN的卷积,其中N是在这层上过滤器的个数。实际上,网中网层是做了一个N维元素的对应相乘,其中N是层中输入的深度。
Min Lin 所著相关文献对网中网层进行了更详细地阐述。
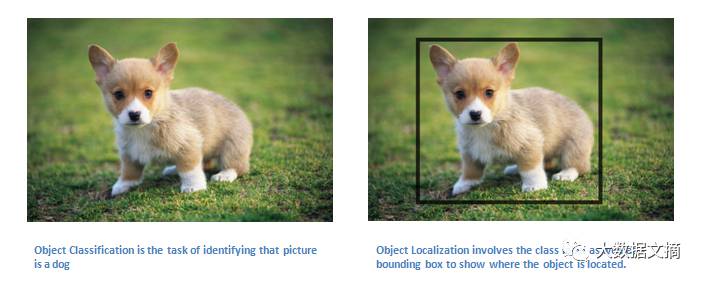
分类、定位、检测、细分
在CNN入门手册(上)(加入链接)中,我们讨论过给图片物体分类这一任务。在这个过程中,我们先输入一张图片,然后从一串类别中输出图片物体对应类别的序号。但是,对于物体定位这样的任务而言,我们的目的不仅是得到分类序号,还要在图片中用边框指出物体的位置。
最后,我们还有细分物体的任务,其目的是输出分类标签和图片中所有物体的细节轮廓。
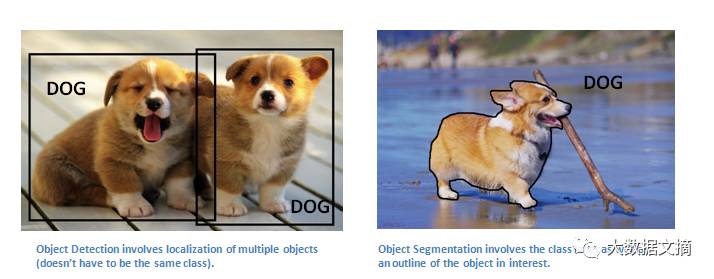
检测/定位、细分
是的,还有更多的参考材料没有被列举出来。
迁移学习
目前,深度学习圈子里有一个常见的误区,即如果没有谷歌式的海量数据,你就不可能做出一个有效的深度学习模型。虽然数据是创建神经网络的重要部分,但是迁移学习的思路可以减少数据的需求量。迁移学习的做法是采用一个预训练好的模型(别人用大量数据训练得到的神经网络的权重和参数),再用自己的数据微调模型。这个思路利用了预训练的模型进行特征提取。你需要把原来神经网络的最后一层去掉,换成你自己的分类标签(取决于你的问题空间),接着保持其他层的权重不变,正常地训练神经网络模型(保持其他层不变意思是在梯度下降/最优化的过程中不改变其他层的权重)
我们来讨论一下为什么这个方法可行。比如说我们用ImageNet( ImageNet是一个包括了超过1000类1400万张图片的数据集)训练得到预训练的模型。考虑一下神经网络模型的低层,我们知道低层部分会检测到诸如边缘和曲线这样的特征。现在,除非你的问题空间和数据集很独特,你的神经网络模型也会需要检测曲线和边缘特征。与其从随机权重初始值开始训练整个神经网络,我们可以采用预训练模型的权重(并保持这部分权重不变),然后重点对重要层(更高的层)进行训练。如果你的训练集数据与ImageNet差异很大,你可以只固定低层部分中的几层,用自己的数据训练更多层。
Yoshua Bengio 所著的参考文献(另一个深度学习的大师)
Ali Sharif Razavian 所著的参考文献
Jeff Donahue 所著的参考文献
数据增强技术
到目前为止,我们对卷积神经网络中数据的重要性大概还是模糊不清的。事实上,海量的数据对卷积神经网络的训练是十分重要的。(当然了,迁移学习可以在一定程度上弱化我们对数据量的要求。)那么最后,就让我们来讨论如何通过几个简单的变换增加已有的数据量吧。正如我们之前提到过的,当一个计算机处理一个图片输入时,它会读入一个像素值数组。如果整个图片都向左移动了一个单位,对于你我来说,这个变化是感觉不到的。然后,对于一个计算机而言,在分类和图片标签不变而像素数组改变的情况下,这个移动可能会造成很大的影响。在改变训练数据表示的同时固定分类标签的这种方法,被称为数据增强技术,这是一种人为扩展数据集的方法。一些常用的数据增强方法有调成灰度(grayscales),水平翻转(horizontal flips),竖直翻转(vertical flips,),随机裁剪(random crops), 颜色抖动(color jitters),平移(translations), 旋转(rotation)等等。如果对训练集的数据进行以上这几种变换,你可以很容易地得到原数据两至三倍的数据量来训练模型。



新锐产品推荐
深绘科技-产品信息管理·PMDM
- 0.0
(0)咨询产品免费试用深绘科技-美工机器人
- 0.0
(0)咨询产品免费试用佩企信息-HR SSC软件
- 0.0
(0)咨询产品免费试用唯智-订单管理系统OMS
- 0.0
(0)咨询产品免费试用唯智-运输管理系统TMS
- 0.0
(0)咨询产品免费试用唯智-路径优化系统ROS
- 0.0
(0)咨询产品免费试用







