硬核技术!走进3D点云车道线自动识别
随着自动驾驶技术发展驶入快车道,3D传感器的使用正在变得越来越普遍。常见的3D传感器包括激光雷达、毫米波雷达、深度相机、3D扫描仪等,它们可以从现实世界中获取物体和环境的几何、形状和比例信息,帮助AI理解现实环境。
在3D点云数据中,车道线的识别是非常重要的模型之一。有了它,自动驾驶车辆才能在正确的车道上平稳行驶。然而,由于车道线本身的多样性(环岛、交叉线)以及外界光照、车辆遮挡等影响,3D点云数据中的车道线标注一直是一个困难且耗时的课题。
澳鹏Appen中国自主研发的人工智能辅助数据标注平台,集成了为多样场景定制的标注工具箱。其中,3D点云车道线自动识别便是Appen团队针对这一课题研发的一项成果。
3D点云车道线标注难点
- 车道线难以观察:初始点云中的车道线用肉眼难以辨别,需要借助反射率颜色调整才能勉强看清;
- 3D点云数据的稀疏性:3D数据每个都是孤立的点,难以找到点与点之间的相邻关系,这为车道线识别带来巨大的困难;
- 实际应用中存在的问题:大量弯道线、日积月累的消耗和损坏等,带来的形状和反射率失真问题,也为识别带来不小的难度。
交互式车道线辅助标注模型
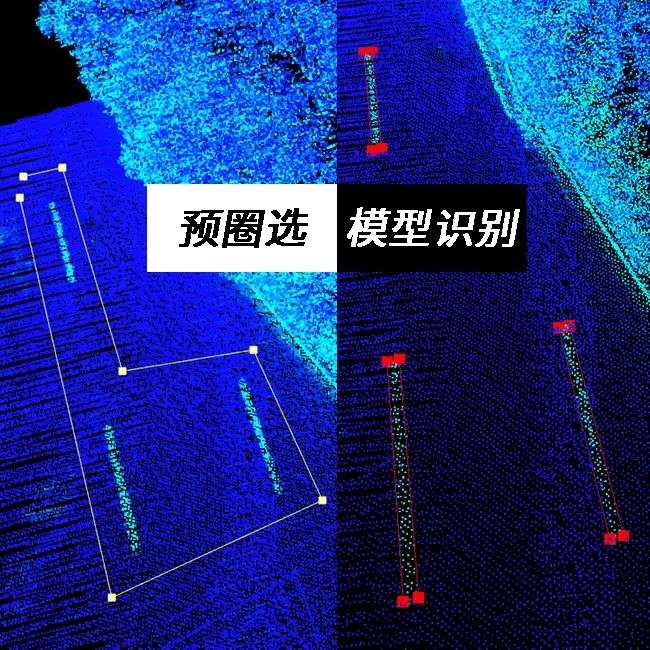
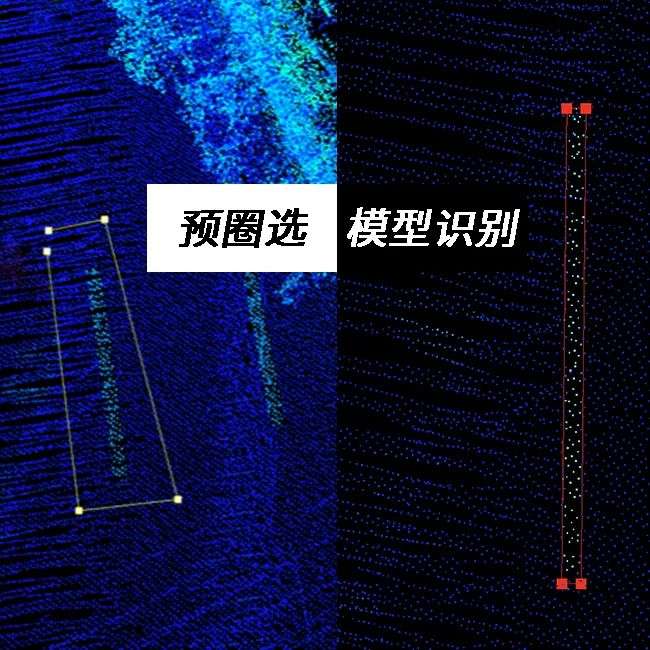
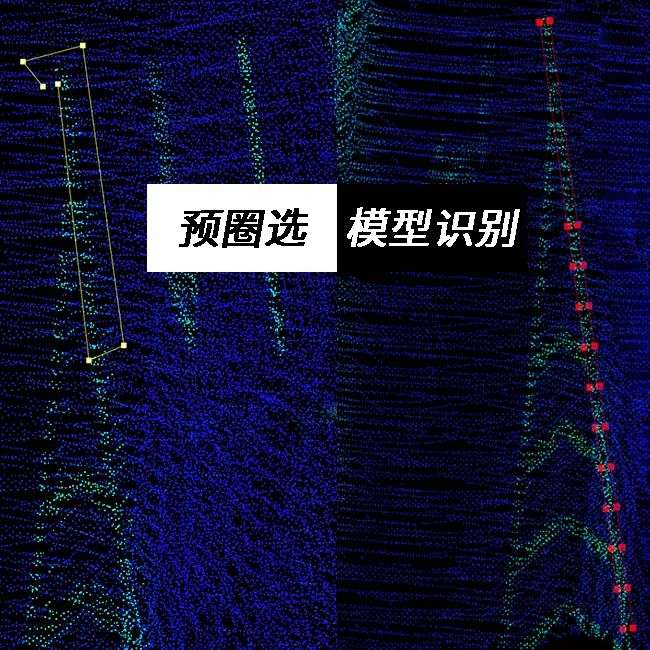
针对以上难点,Appen中国研发团队提出了交互式车道线辅助标注模型。通过该模型的应用,标注员只需要进行简单的拉框,将完整车道线拉入范围,模型就能够做到实时返回对车道线的预测结果。标注员基于预测结果进行简单的修改或调整即可完成标注,无论在效率还是准确率上都能够得到巨大的提升。
START
STEP1:圈定车道线范围
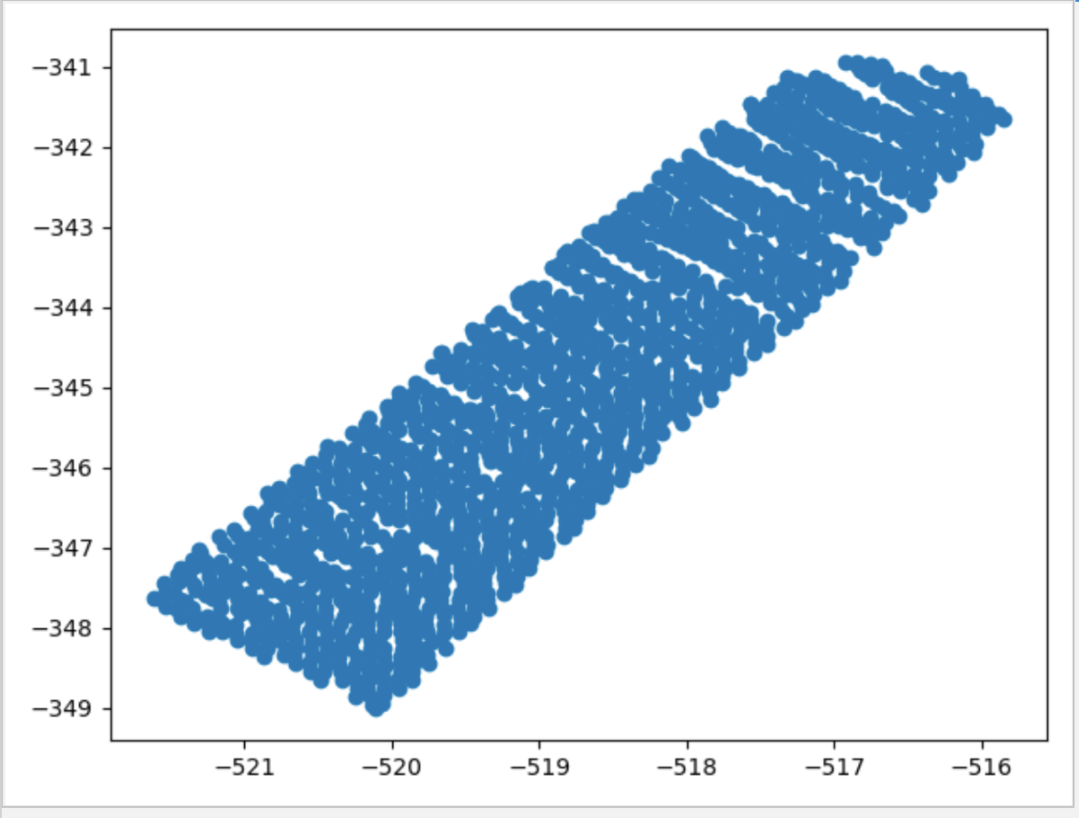
通过结合形态滤波算法、PCA等,得到一个快速且准确的地面点分割算法,能够极快地分割出地面点,去除地面意外的干扰点云。
STEP2:二值化
利用 OTSU大津算法及三角算法同时进行二值化运算,将结果进行按比结合,能够同时应对双峰场景和单峰场景下的二值化。
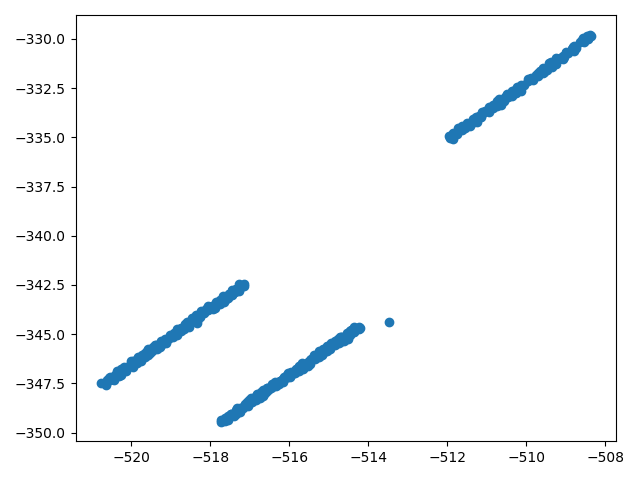
STEP3:DBSCAN聚类
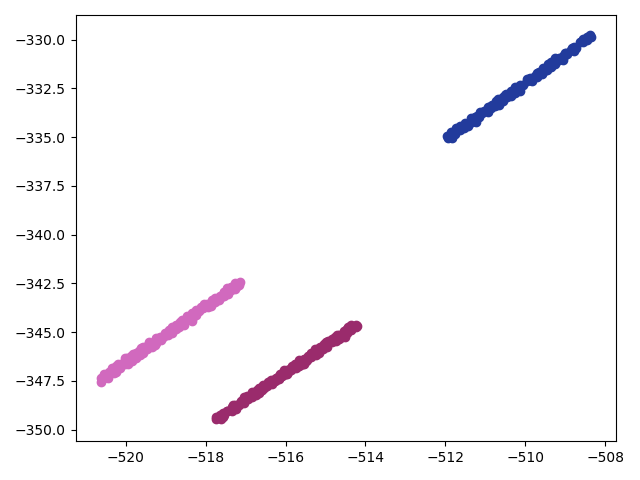
DBSCAN能够利用密度空间距离因素进行聚类,无需指定类目数量,且能够自动去除一些杂质点,非常适合3D点云车道线的标注场景。
STEP4:曲线拟合
先将3D点云2D化,在2D中得到几乎能够代表车道线正确方向的拟合曲线,有了这个车道线的方向,模型才能更好地进行车道线拟合。
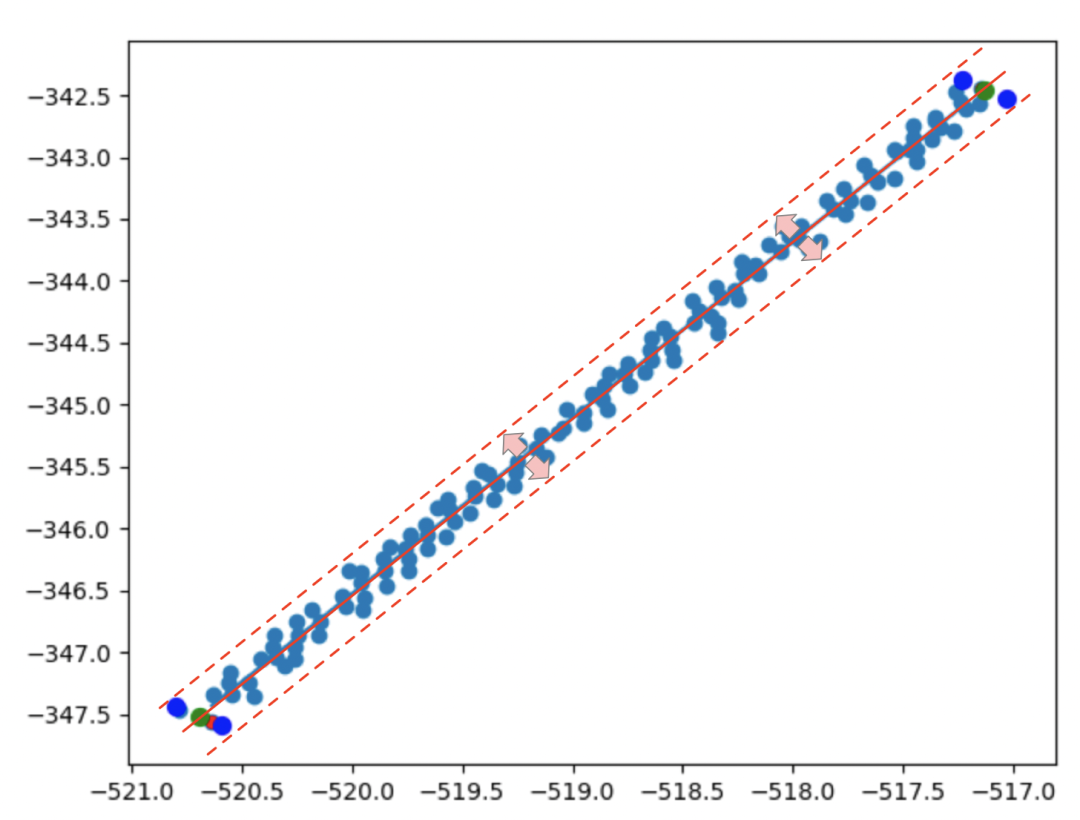
STEP5:去噪及精细化
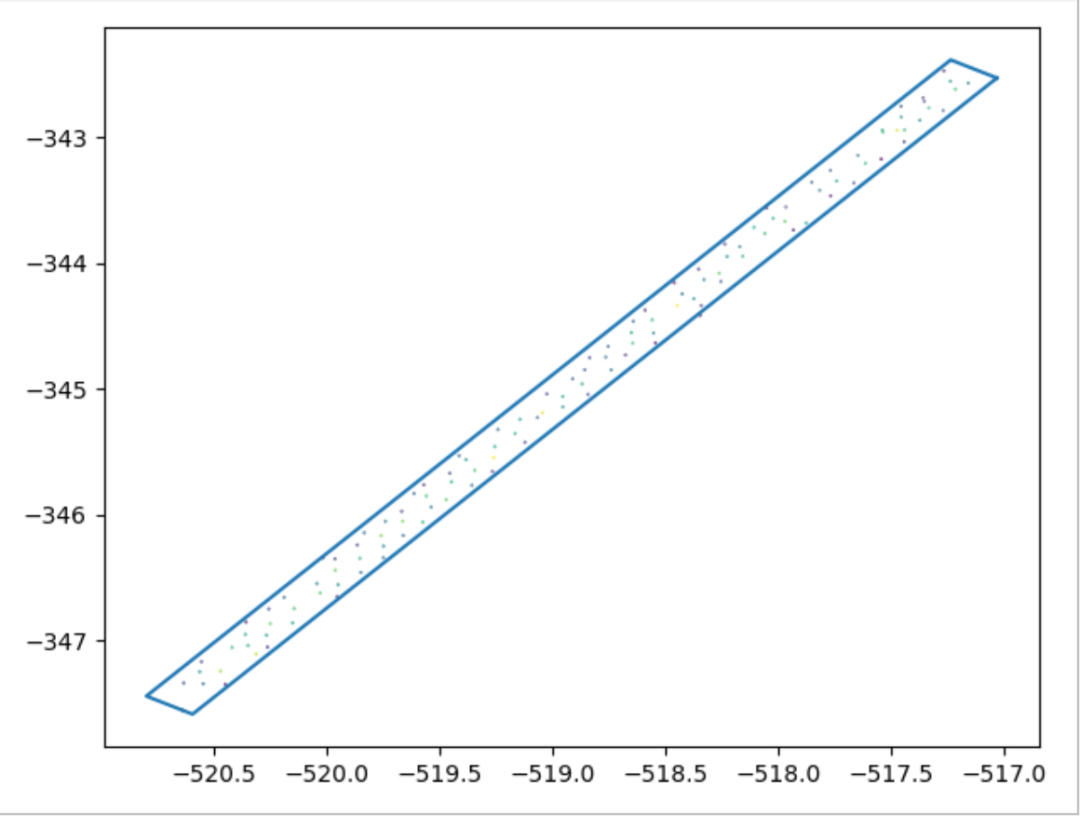
在边界探索算法的基础上,结合Grubbs去噪能力,模型能够快速拟合一个车道线形状,在该形状内,无论高反射率还是低反射率的点都是组成该车道线的点云。
FINISH
Appen交互式车道线辅助标注模型能够在标注员圈定的范围内快速进行车道线识别,并将最终结果返回给标注员;如果模型预测结果不佳,标注员也可以通过简单的操作进行修复。模型将局部3D点云进行分解聚类及车道线拟合,最终产出标注完成的车道线点云结果。
标注效率提升成果
通过3D点云车道线自动识别功能,标注员的操作流程变为极其简单的三步——第一步:选择智能模式;第二步:圈选大致范围;第三步:观察模型返回结果,并根据情况手动修正。简单三步即可完成数个车道线标注任务,相对全部人工标注效率可提升约 6 倍。
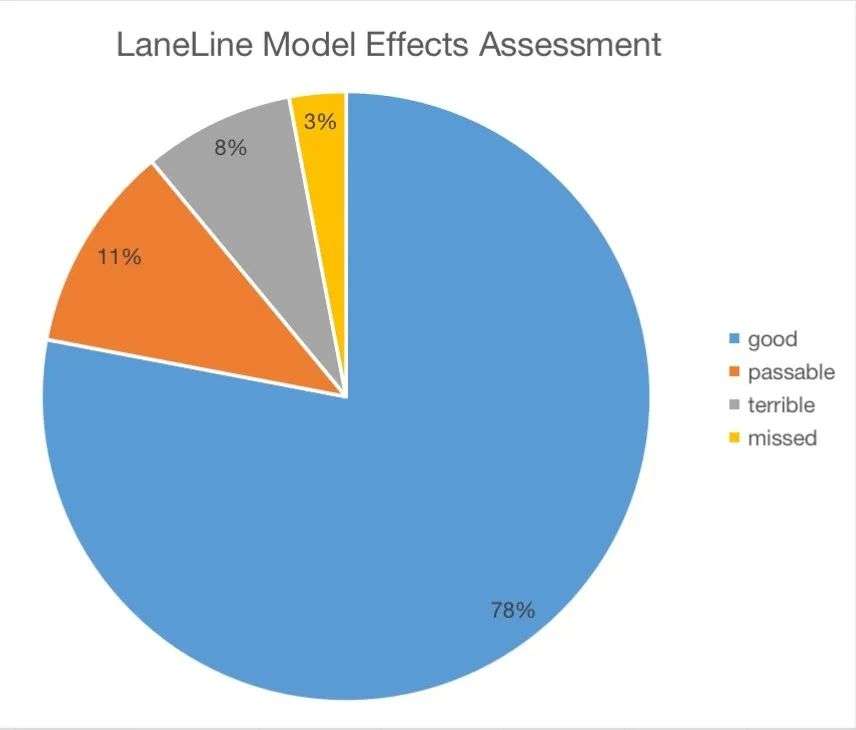
模型识别效果展示
同时,在实际测验的结果中,大部分车道线均可做到成功拟合。模型的成功识别率达到78%, 加上可微调的部分,总识别率可达89%。
澳鹏(中国)人工智能辅助数据标注平台
集成多样标注工具箱 覆盖各种标注场景
马上扫描下方二维码
与我们的专家咨询落地方案
更可获得免费试标注机会!

澳鹏Appen是全球领先的AI训练数据服务提供商。凭借20多年的海外平台实践,澳鹏中国产研精英团队独立自主打造了适合本土行业特点的“高精度AI数据服务平台”,集成了强大的产品技术攻关能力、高效的项目管理水平及百万级众包资源。目前已助力全球7500+个AI项目研发及商业化。



SEO搜索引擎优化相关的软件
Majestic
- 4.4
(40)咨询产品免费试用Semrush
- 4.2
(40)咨询产品免费试用百度统计
- 3.5
(34)咨询产品免费试用



行业专家共同推荐的软件
水滴互动B2B-SEO获客优化工具
- 4.0
(13)咨询产品免费试用企优托
- 4.5
(2)咨询产品免费试用曼朗-搜索引擎优化
- 4.0
(7)咨询产品免费试用



限时免费的SEO搜索引擎优化软件
Ahrefs
- 3.9
(40)咨询产品免费试用Similarweb
- 4.0
(40)咨询产品免费试用


新锐产品推荐
百度智能云-对象存储BOS
- 3.6
(15)咨询产品免费试用Google Analytics
- 3.5
(1)咨询产品免费试用88完美邮箱
- 4.2
(2)咨询产品免费试用139邮箱
- 4.0
(4)咨询产品免费试用189邮箱
- 4.0
(1)咨询产品免费试用视觉中国
- 4.2
(17)咨询产品免费试用







