小鹏推出“地表最强自动泊车”,但离彻底解决停车困难还有点距离
编者按:本文来自微信公众号“品驾”(ID:Ping-Drive),作者:王飞,36氪经授权发布。
我的一位朋友总是有这样的一种困惑:每次把车开进公司地库却找不到自己的固定车位在哪里。
是的,他就是一进地库就迷路的新手司机。
其实拥有这种困惑的新手司机不在少数。随着自动驾驶技术的日益进步,很多智能汽车公司也盯上了这类特定用户的使用场景。
在小鹏汽车最新推送的Xmart OS 2.6.0 OTA更新中,就加入了小鹏NGP(NGP体验文章点这里)之后又一功能——VPA停车场记忆泊车。熟悉汽车自动驾驶技术的朋友可能听过AVP(Automated Valet Parking)——即自动代客泊车功能,是指在一些场景下让机器代替驾驶员进行泊车,而VPA(Valet Parking Assist)的字面意思是代客泊车辅助,功能类似,官方则称之为停车场记忆泊车。从小鹏NGP的独立命名上来看,小鹏汽车确实也有意让其命名在品牌上做一定的区分。
在小鹏汽车的定义里,这是业内首个量产且不依赖于停车场改造的“最后一公里”泊车功能,自称“地表最强自动泊车”。
之所以强调“最后一公里”,其实是在进入停车场的开始,驾驶员就可以完全解放双手,由小鹏汽车P7自主去找到停车位,然后泊车入库。

在过去,有不少自动驾驶车厂演示过类似的在地库停车的自动泊车和自动召唤等技术方向的解决方案,但或多说少都需要对停车场进行一定的标定,甚至一些简单的改造。
而小鹏汽车VPA则强调了不对停车场做任何改造。
那么,小鹏汽车从地库入口到车位一共分几步呢?
我们坐上小鹏汽车P7之后,先要从app上学习一次VPA停车场记忆泊车安全测试,这点有点类似于此前NGP开启前的学习和考试。
之后便可以打开中控屏幕上的VPA功能。这个功能简单说就是你教VPA一次,VPA之后就会复刻你这一次的停车过程,达到自动泊车的效果。
当我们来到地库入口(通常是经过停车场收费口后),将车从N挂入D档,屏幕上就可开启了记忆泊车功能。我们七拐八绕找到一个靠中间位置的停车位,把车辆停在停车位的全过程中,屏幕将两侧空车位以及已经停车的车位进行了一次“高精地图”的绘制,此时的这辆小鹏汽车P7已经记住了这一系列流程,脑子里存好了画面。然后屏幕提示:记忆泊车功能已解锁。

这张“高精地图”融合了很多记忆路线上的“地标”,比如车道线、墙面、立柱和路口等,甚至还包括了识别减速带。

所以这里也看得出来,虽然不依赖于停车场改造,但其实还是有一个自动标定的过程。
系统画出的图有点像贪吃蛇
值得注意的一点是:地库中并没有GPS信号,网络连接本身也不通畅,所以它本身所有的数据存在了这辆边缘侧的汽车上,而非云端。
在完成解锁记忆泊车之后,其实还有一个去到地面行驶200米路程的过程,应该是恢复到拥有GPS信号的环境,对这一车库的位置进行标定——让车辆记住是哪一个车库。因为这套小鹏VPA的功能支持记住100个车位的记忆泊车。
这之后,在重新回到地库后,打开记忆停车功能,车辆就会按照此前行驶的路线自动行驶,在过程中还可以识别减速带以及自动打开转向灯,在到达记忆车位后,自动执行泊车入位,整个过程行云流水。

图片来源:新浪汽车
我们体验时的停车场内部路况还算比较完美。但实际上不同地库内的停车车况可能会更复杂:
比如会车遇到前方车辆新手司机不能会车(障碍物停止),那么会车可能中断,需要接管;前方车辆会车经过之后,有时也会提示接管,难以继续进行。
地库的场景其实本身比较昏暗,出于安全性的考虑,其实驾驶者本身的精力也需要时刻保持集中。
记忆泊车本身是执行上一次一样的操作,假设上一次是绕路几圈后才找到车位,那么它也会跟着绕路。
地库中可能会有别的车辆逆向行驶这种危险车况,车机本身还不能应付。
其他用户的几次体验过程中,也遇到了十字路口来车,出现必须接管的情况。
仔细想一下,目前这种技术应用的场景确实仍有一些局限性:比如记忆泊车本身照顾的其实是多次并非单次的停车场景,商场非固定车位基本上可以排除在外,一般来说固定的家用或者是公司的地下车位可以开启——比如家里地库本身很空旷,每次进入地库就可放心开启——但开启这种功能感觉更多实属尝鲜,必要的开启场景需求并非一定存在。一开始提到的新手司机最终也会变成老司机。
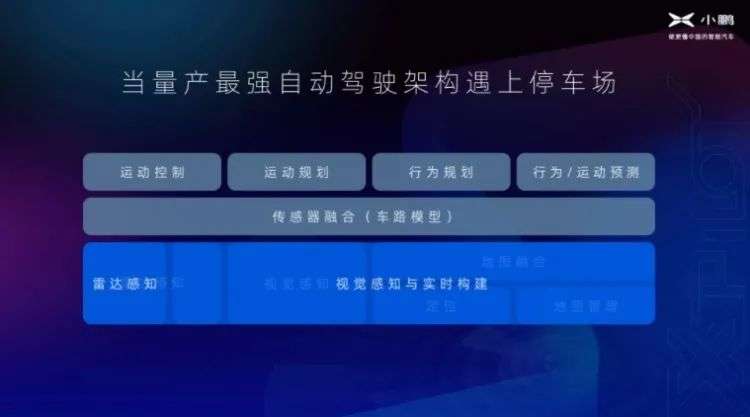
小鹏汽车对这一技术的说法是,这种中低速场景也是对其自动驾驶架构以及拓展场景的一种验证。在小鹏汽车辅助驾驶场景的定义里包含了三个场景:高速场景、城市场景和超低速场景(如停车场)。停车场记忆泊车功能的推出,意味着超低速场景自动驾驶辅助的突破。
小鹏汽车VPA记忆泊车功能实现的记忆路线最长是1000米,但小鹏没有提及具体产生的数据量。而目标主要针对的场景是地下停车场,按照规划,未来可能会持续拓展到更复杂的停车楼和地面停车场。
当跑通这种这种场景之后,记忆泊车其实会作为自助泊车的一种基础能力存在。基于此,可以实现自动泊车入位后,结合已经建好的超充地图实现自动开启充电等应用,最终其实都是在训练和丰富点到点的车辆自动行驶能力。
不过后续技术的演进其实也伴随一系列挑战,比如不同地库的记忆停车所生成的数据是否会被收集,它本身对于后续的技能提升和场景实现又有多大作用?其中涉及到的用户数据使用权和归属权又如何界定?在接受采访时,小鹏汽车也提到,他们试想过多车共享数据,但在用户没有同意共享之前,基于保护用户隐私的前提下,不能做多车共享。
目前来看,小鹏的这个记忆泊车离彻底解决停车困难还有点距离,不过它算是给超低速场景的辅助驾驶应用先打了个样,让人们可以想象一下未来更多的可能。






行业专家共同推荐的软件
易后台
- 0.0
(0)咨询产品免费试用众乐邦 -灵活用工
- 0.0
(0)咨询产品免费试用99企帮
- 0.0
(0)咨询产品免费试用



限时免费的税务筹划软件
有度税智-企业税务系统
- 0.0
(0)咨询产品免费试用杭州储炎
- 0.0
(0)咨询产品免费试用51优税
- 0.0
(0)咨询产品免费试用



新锐产品推荐
帆软FineBI
- 4.2
(112)咨询产品免费试用AWS
- 3.9
(15)咨询产品免费试用奥博信达-电商管理(旺店通)
- 0.0
(0)咨询产品免费试用国华识别
- 0.0
(0)咨询产品免费试用中安未来-个人证件识别
- 0.0
(0)咨询产品免费试用微模式-识别验证服务云平台
- 0.0
(0)咨询产品免费试用







