马斯克:我信摄像头,我要死磕到底

特斯拉在自动驾驶技术上坚决押注「纯视觉」路线,一旦成功,则无敌天下。但风险,一样天下无敌。
北京时间 8 月 20 日上午,特斯拉 AI 日如期召开,正如其名字预示的那样,活动围绕着 AI 人工智能展开。与以往不同的是,这次活动特斯拉没有邀请媒体,也没有邀请投资人,只邀请了相关领域的工程师们,因此抛开商业化的问题之后,这次活动更像是一场针对技术方面的前瞻性汇报与演示。
AI 日上,特斯拉人工智能和自动驾驶视觉总监 Andrej Karpathy 详细介绍了特斯拉的「神经网络」,特斯拉众位高管也着重阐述了特斯拉在自动标记等技术上的进展,之前就备受关注的超级计算机 Dojo 也正式亮相了。
仔细观察不难发现,特斯拉 AI 日上介绍的所有技术似乎都隐隐传达着一个信号:即便越来越多的车企采用激光雷达技术实现自动驾驶,马斯克依旧要特立独行,势将「纯视觉路线」进行到底。
拥有超强算力的「道场」Dojo
五天前,特斯拉官方曾发布一张海报预热 AI 日活动。
海报上展示了一个大规模芯片模组的结构,包括芯片核心、铜板、散热器、金属外壳等组成元素,人们纷纷猜测这是否与特斯拉 AI 日上将公布的新产品有关。事实证明确实如此。
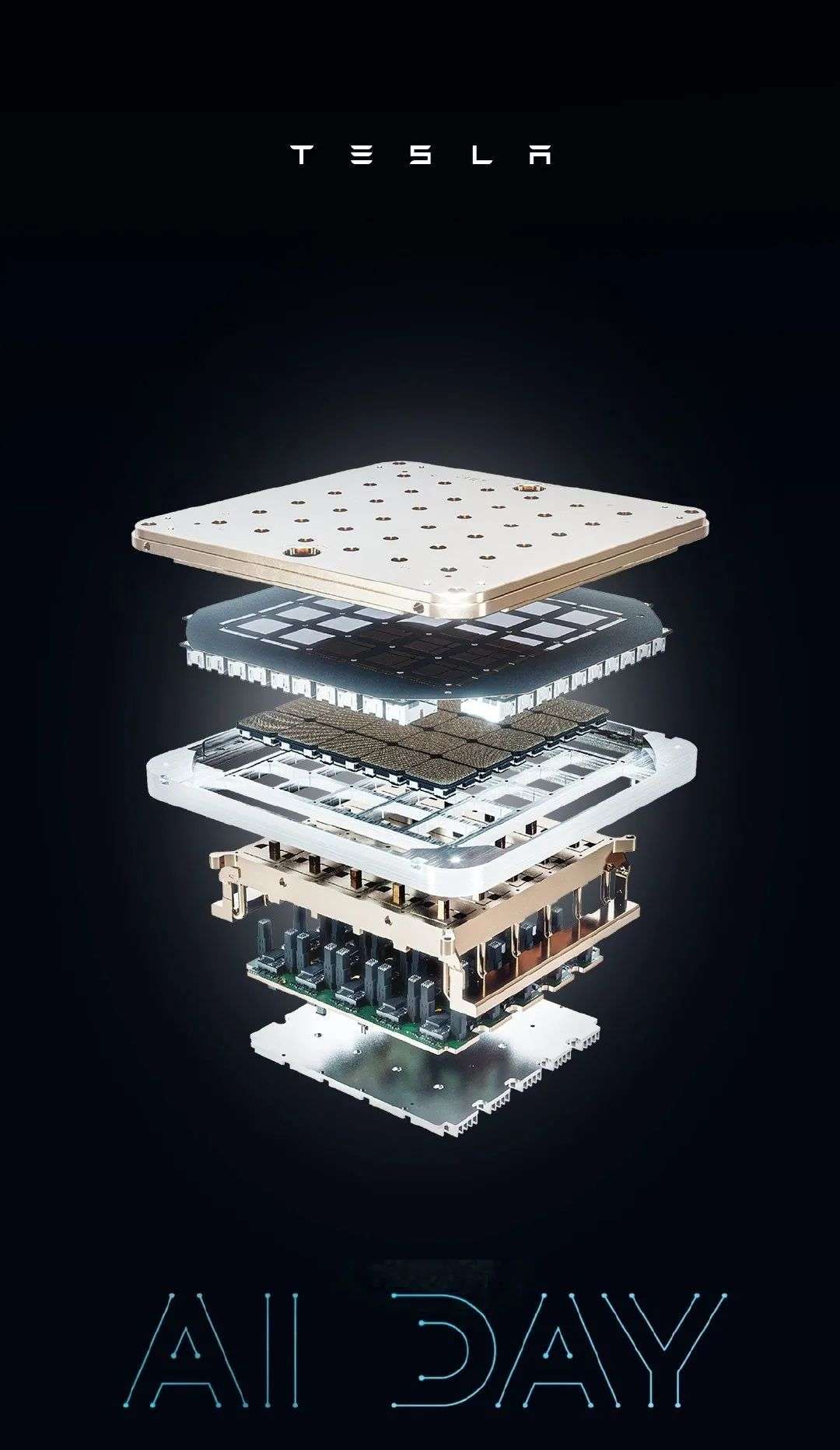
特斯拉 AI 日宣传海报|特斯拉官网
这其实是一个集合了 25 块 D1 芯片的训练模块,而自研 AI 训练芯片 D1 可以说是 AI 日上最重磅的技术突破之一。
D1 芯片由特斯拉自主研发,7 纳米制造工艺,单片 FP32 达到算力 22.6TOPs,BF16 算力 362TOPs,这几乎是目前市面上最强的芯片。
而且 D1 芯片可以进行无缝融合,25 个 D1 芯片构成一个训练模块,更多的训练模块相互组合则构成了拥有更强大算力的超级计算机 Dojo。
Dojo 的名字不是第一次出现了,早在今年 6 月的 CVPR 2021 工坊活动上,Andrej Karpathy 就介绍过这台超级计算机,当时的 Dojo 搭载的还是英伟达的芯片,总算力为 1.8 EFLOPS,被认为可以跻身全球第五强超级计算机。
这次搭载了 D1 的 Dojo 亮相后,计算机博弈专家、芯片专家吴韧称赞这是「很精彩的设计」,甚至在朋友圈表示「如果 Elon 原意,或许这是 nVidia 最大的竞争者,实际上芯片巨头们的坐次可能需要重新排位。」
马斯克一直认为「解决自动驾驶的唯一方法是解决现实世界中的 AI 问题,无论是硬件还是软件,除非一家公司具有很强的 AI 能力以及超强算力,否则很难解决自动驾驶难题。」
因此特斯拉这次推出拥有强大算力的超级计算机 Dojo,其实也是出于解决自动驾驶问题的考量。与其他超算不同的是,这个被命名为「道场」的超算,其所有力量只用来做一件事儿:训练 Autopilot 在内的整个自动驾驶系统。
纯视觉路线
「道场」已经建好,受训的特斯拉 AI 神经网络更是关键。
特斯拉的神经网络主要用来处理物体识别和道路规划等功能所需的数据,这些是支持特斯拉 Autopilot/FSD 得到基础。
AI 日上,特斯拉 Autopilot 工程主管 Milan Kovac 向观众展示了特斯拉的 AI 神经网络究竟是怎样应用的。
特斯拉汽车的视觉组件|特斯拉官网
在特斯拉的汽车中,每辆车装有 8 个摄像头,每个摄像头获取原始输入后能创建不同的分辨率,用于不同的功能和目的,最终这些信息会被输入到复杂的神经网络中,生成对自动驾驶有用的附加信息。
然而问题在于,即便拥有 8 个摄像头,其背后神经网络的矢量空间依旧不够。于是,特斯拉研发了自动标注技术,即便行驶过程中视野被遮挡,根据数据的标注,车辆也能更安全、准确的导航。
Andrej Karpathy 还称,现在特斯拉的自动驾驶场景模拟系统可以在行驶过程中实时绘制路况,结合多个车辆经过同一地点的绘制,得到一个完整的地图。
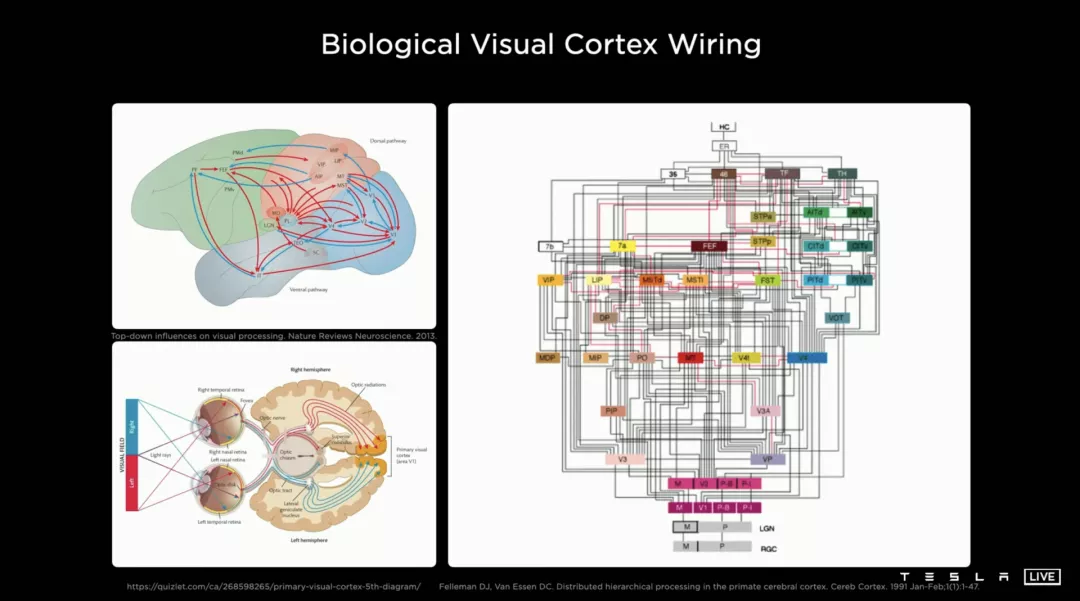
而这恰恰是特斯拉和 Waymo 等竞争对手最大的不同:基于类似人脑的视觉感知系统、自动化标注能力,以及仿真等功能,特斯拉在 Autopilot/FSD 上试图摆脱激光雷达,力图将「纯视觉」路线走得更加彻底。
这确实是马斯克一贯的坚持。
2019 年,马斯克一句「把激光雷达装在车上真的很蠢」,直接将自动驾驶技术路线一分为二,激起千层浪。
以特斯拉为代表的仅以摄像头与各种传感器作为硬件,背后重算法的路线,与 Waymo 为代表的注重激光雷达的技术路线,站在了对立面。
关于二者谁能走到最后,到今天也没有出现一个决定性的结论。
激光雷达,顾名思义是以激光作为信号源,由激光器发射出的脉冲激光打到周围物体上引起散射,一部分光波会反射到激光雷达的接收器上,根据激光测距原理计算,就得到从激光雷达到目标点的距离。激光不断扫描目标物,就可以得到全部数据,成像处理后,可得到精确的三维立体图像。
而在马斯克看来,「纯视觉感知才是通往真实世界 AI 的道路」,既然人类是通过视觉收集信息辅以大脑处理信息的方式进行驾驶,那自动驾驶也应当能通过视觉感知辅以算法处理的方式实现安全驾驶。
当外部环境越来越复杂,自动汽车上安装的传感器也越来越多,如果雷达与摄像头传来的信息互相矛盾,自动驾驶系统反而会更加难以抉择。
马斯克拒绝「拉扯」,他选择直接将摄像头的作用发挥到极致。
将「第一性原理」贯彻到底?
熟悉马斯克的人都知道他一直奉行「第一性原理」,即回归事物最基本的条件,将其拆分成各要素进行结构分析,从而找到实现目标的最优路径的方法。
目前「感知、判断驾驶环境」无疑是自动驾驶领域的核心困难,马斯克依旧回归到「感知」的基础,不遗余力地将 AI 进化到能与人类视觉感知媲美的地步。
马斯克认为,毫米波雷达不擅长描述物体的缺陷是几乎不可能弥补的,而摄像头不擅长探测距离的缺陷却是可以弥补的。为了「一步到位」,马斯克丝毫不考虑将激光雷达安装在特斯拉上。
事实上,特斯拉的「纯视觉路线」,需要更加深度地学习海量的数据,深度训练神经网络,这一点对于其他的自动汽车公司而言,绝不是敢轻易尝试的。马斯克能坚持下去,和其起步早、能积攒的数据多不无关系。
据高盛估计,目前特斯拉车队的数量在全球超过 150 万辆,这为特斯拉提供了大量、多样化和真实世界的数据库。这意味着,即便数据采集效率相同,跑在路上的特斯拉数量是对手的数十倍,数据量也就是竞争对手的数十倍。
再加上今年特斯拉一季度销量在全球范围内飙升到了 18 万辆以上,有着超过 200% 的涨幅,整体而言特斯拉的盈利处于上升状态,研发资金方面也无需忧愁。充足的资金,让特斯拉敢于为纯视觉自动驾驶路线「砸钱开路」。
特斯拉想在技术路线上保持自己的独特优势是可以理解的,据相关人士分析,如果特斯拉能在「纯视觉」上开辟出一条道路来,形成独特的自动驾驶技术闭环,无疑会让特斯拉距离「电动车界的苹果」更近一步。
当然,这个决策背后的商业风险也是不容忽视的。
因为另一边,随着随着技术发展,激光雷达不断完善优化,价格也在逐渐下降。
激光雷达头部公司 Velodyne 本周宣布,其最受欢迎的激光雷达系统 VLP-16 的价格相比 2016 年降低了一半。激光雷达价格下降受惠于产能、研发成本平摊;辅助自动驾驶推广等因素。
如今,已经有越来越多的车企选择了激光雷达,这意味着未来「激光雷达」的技术路线或许将比「纯视觉」路线拥有更多的规模效应以及成本优势。
而如果未来视觉+激光雷达一派,在自动驾驶能力上做到和特斯拉相差不多,则意味作为「破风者」的特斯拉,为纯视觉路线自动驾驶探索砸下的成本会和收益不成正比。这对于需要长期投入的特斯拉来说,将是不小的压力。
但对于马斯克而言,他不在乎。他似乎就是要在第一性原理的的思想下,以愚公移山的劲头,在自动驾驶领域跟「纯视觉路线」一路死磕到底。
(实习生谢睿哲对稿件亦有贡献。)
本文来自微信公众号 “极客公园”(ID:geekpark),作者:鱼三隹,36氪经授权发布。






行业专家共同推荐的软件
意派Epub360
- 4.1
(5)咨询产品免费试用易海报
- 4.0
(5)咨询产品免费试用百度H5
- 3.7
(8)咨询产品免费试用



限时免费的H5制作软件
秀多多
- 3.9
(5)咨询产品免费试用兔展
- 3.9
(5)咨询产品免费试用凡科微传单
- 4.0
(3)咨询产品免费试用



新锐产品推荐
伙伴云分析
- 4.8
(17)咨询产品免费试用秀多多
- 3.9
(5)咨询产品免费试用内容神器
- 3.6
(17)咨询产品免费试用摄图·云编辑
- 4.1
(7)咨询产品免费试用速排小蚂蚁
- 3.7
(18)咨询产品免费试用伙伴云-零代码aPaaS
- 3.2
(4)咨询产品免费试用






