耶鲁大学公布第一个仿生手抓取视频数据集,超60个小时22种分析法27000个抓取实例
本文来自微信公众号“机器人大讲堂”(ID:RoboSpeak),作者:Robospeak,36氪经授权发布。
科幻电影中,动作自如的仿生假肢使身体残缺的人行动与常人无异,人类可以利用肌电信号,控制身外之物。
这一切都从内到外渗透着天马行空的想象力,各种未来科技世界的场景不禁让人心存涟漪——一位失去手臂的残疾人,可以操纵智能仿生手拿取物品吗?

答案是肯定的。
到目前为止,已经诞生了不少仿生肢体,旨在帮助残障人士恢复正常生活,甚至可以增强人体功能,成为“超能力者”。这些仿生手柔软、外形充满科技感,有些还与脑机接口技术结合,声称能够通过“意念”控制。

仿生肢体的强大功能不可否认,但目前它们仍处于实验室研究阶段,预抓取的结果并不一定能给出日常活动的准确表现。
“当仿生肢体从“科技幻想”投影到现实,其在日常生活中长期使用的感受到底是什么样的?”
“意念控制等强大功能,用户是否在日常中真的需要?”
这些问题都是需要仔细思量的。

耶鲁大学Grab实验室主要进行各种灵活机械手的设计、仿生手、辅助与康复设备等方面的研究。最近,他们公布了超过60个小时的视频数据集,首次研究了人们在日常生活中使用仿生肢体的情况。

数据集获取不易,22种分析法,产生27000个抓取实例
“分析仿生肢体使用者在日常生活中如何使用这些设备,可以为现有技术或治疗干预措施的缺陷提供有价值的见解。” 耶鲁大学Grab实验室的研究人员表示。

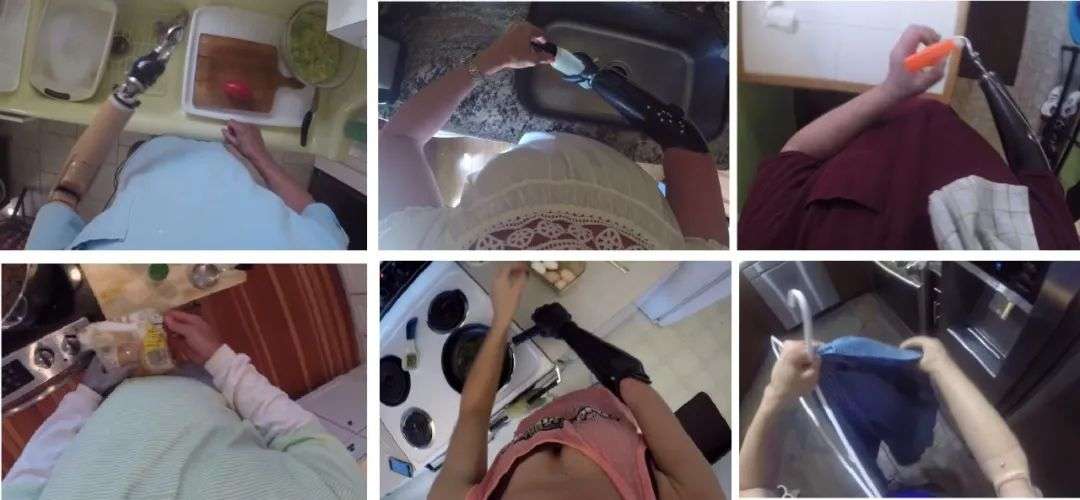
这份数据集收集的可以说是相当不容易,研究人员让8名手部残缺人士使用头戴摄像机记录自己每天如何使用仿生肢体,例如做饭、煮咖啡、打扫卫生或洗衣服,共持续6个月。
(受试者均为只有单手残缺的患者,这样他们另一只完好的手可以起到空白组对照实验的效果。)
直接获取的视频是不可用的,对视频的后续处理要更加细致,才能获得可用的数据集。对于视频中的每个抓取实例(仅限右手),都要对抓取类型、对象属性,包括大小、形状、刚度和质量参数,以及任务属性,包括力、运动约束和一般类参数进行标记。
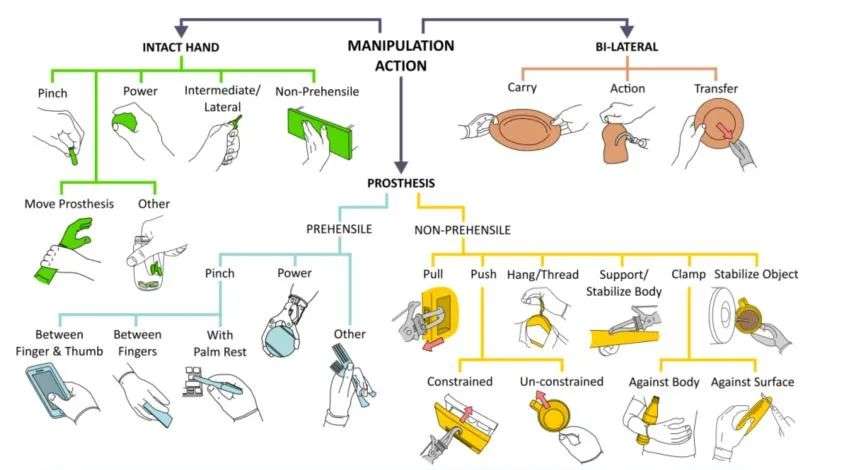
研究人员使用22类定制的操作分类法分析视频数据,产生了超过27,000个仿生上肢操作标记类型。
▍数据集标签频率可看出受试者偏好,仿生肢体仍需进步
通过分析数据集中单个标签的时长和频率,可以看出受试者在日常中使用仿生肢体的偏好,也能暴露出目前仿生肢体的不足之处。
受试者使用的仿生手设备如下,基本都是大名鼎鼎的业内翘楚,包括能够使用肌电信号控制的奥托博克机械手,以及被称为“终结者之手”的i-limb ultra等。

其中,经桡动脉和身体动力装置 (TR-BP) 的受试者使用假肢最多(28%),近端肘部 (PE) 截肢者(都有肌电装置)使用假肢的次数要少得多,仅占所有操作动作的 8%。这表明仿生肢体的抓握功能与完整手的抓握功能的利用方式不同。
TR-BP 组最常见的非抓握操作是稳定物体和将物体夹紧在表面上。这与 PE 组相同,但数量较少,对于 TR-Myo 来说,支撑体重是最常见的动作。

尽管不同的仿生肢体之间用户的偏好均不同,但整体而言,由于所有受试者都拥有一只完好的手,相比之下,受试者更愿意使用完好地手进行抓握任务,仿生手更多的被用来辅助,其进行抓握的使用频率平均仅为完整肢体的24%。
这些肢体使用差异可归因于多种因素,包括但不限于仿生肢体的重量、强度、速度、控制复杂性以及缺乏触觉反馈和本体感觉等。同时,所有仿生肢体进行的抓握操作比使用完整手完成的时间要长得多,例如,在肌电控制的设备中,用户必须提供控制信号来打开或关闭设备,而受试者普遍抱怨设备闭合速度慢,与完整手相比,仿生肢体需要额外的努力和时间来定位手臂,因此参与者使用假肢进行比完整手更少、更长时间的抓握也就不足为奇了。

与健康手相比,仿生手的使用频率小,是由于普遍缺乏灵活性和触觉反馈、抓握孔径小和抓握速度慢等原因,使用起来具有更多的不确定性。与几乎毫不费力地控制健康肢体相比,仿生肢体还有很长一段路要走。
【参考链接】
https://www.eng.yale.edu/grablab/humangrasping/
https://www.youtube.com/watch?v=9GekSXq2OJs

图像影音设计相关的软件
凡科快图
- 4.5
(95)咨询产品免费试用墨刀
- 3.9
(423)咨询产品免费试用Pixso
- 3.9
(22)咨询产品免费试用



大厂都在用的图像影音设计软件
蓝湖
- 4.0
(584)咨询产品免费试用Canva可画
- 4.0
(206)咨询产品免费试用字魂
- 4.5
(20)咨询产品免费试用



限时免费的图像影音设计软件
Dprox创意3D视频
- 5.0
(1)咨询产品免费试用万兴喵影
- 3.9
(31)咨询产品免费试用易企秀
- 3.8
(260)咨询产品免费试用



新锐产品推荐
得助智能质检
- 0.0
(0)咨询产品免费试用得助智训
- 0.0
(0)咨询产品免费试用LinkedME深链
- 0.0
(0)咨询产品免费试用LinkedME闪登
- 0.0
(0)咨询产品免费试用固收智能交易管理平台
- 0.0
(0)咨询产品免费试用全程云-云合同
- 0.0
(0)咨询产品免费试用







