NASA实验室推出可折叠机器人PUFFER,用于复杂地形探险
面对复杂的勘探地形和更小的运动空间中,NASA的科学家进行创新,将着陆器和流动站设计得更加轻量化并且可折叠。在加州的帕萨迪纳NASA喷气推进实验室,工程师们一直试图尽可能地将更小的机器人装入更小的空间。近日他们展示了最新的作品PUFFER——一个平面折叠浏览器机器人。在需要的时候,它可以折叠成它近于平面形状进行移动,然后在空间充足的地方又可恢复形状,以此来实现到达一般机器人不可达到的地方,如下图所示。
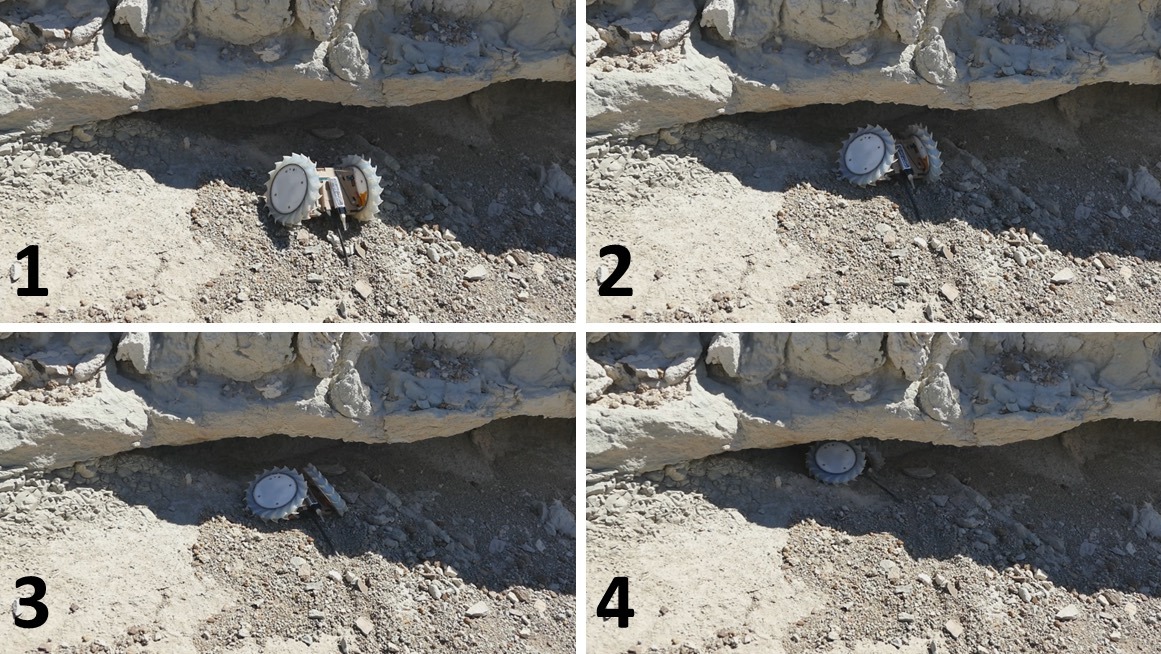
这样一来,就可以将很多个PUFFER机器人打包装进火星车一次性将它们送到火星或任何地方,并且它可以进入传统大体积的流动车进入不了的地方,它既可以沿深沙的沙丘爬行,也可以在火山口的峭壁上攀行,还可以探索空间较小的小角落。
这也带来了其他潜在可能性,当一次可以同时发射几个机器人进入工作地时,这意味着可以考虑设置几台机器协同合作的可能性,甚至可以让机器人在范围内相互“帮助”来进行更加科学的探测和工作。
令人激动的是,PUFFER将可以把过去几年看到的最酷的机器人研究带入实际应用领域。之前谈论的折纸机器人等大多停留在抽象阶段,更多地是想象他们可以在某种程度上有助于救灾或勘探的开展,但未进入实际应用层面。NASA喷气推进实验室正在思考如何用PUFFER技术来在地球之外的真实世界场景中做一些有用的事。
项目负责人Jaakko Karras曾是加利福尼亚大学伯克利分校的Biomimetic Millisystems实验室的研究生, PUFFER最初来自他进入NASA喷气推进实验室后为可折叠机器人设计的智能复合微结构,他发现这些技术可以用在一些小型的行星飞行器上,之后实验室与 Ron Fearing团队合作完成了PUFFER机器人的大部分设计。
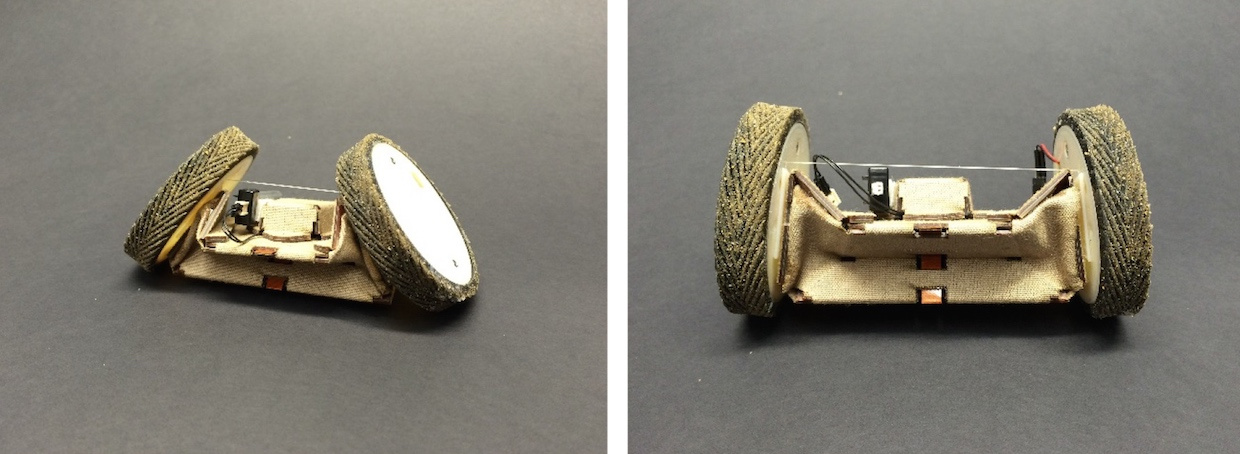
Jaakko Karras表示,可折叠设计在可靠性和耐用性方面会带来的好处和挑战。PUFFER折叠底盘具有很大的灵活性和合规性,它可以使机器人从高处摔落而保持完好,车轮通常是下降时的第一个接触点,可折叠变形的轮子相比普通轮子来说能够更大程度地实现缓冲减震,具有更强的耐冲击性。而设计面临的最大挑战之一就是弯曲铰链的耐久性,这些弯曲铰链需要由薄而柔软的材料制成,但会容易产生撕裂和疲劳引起的裂纹;连接机箱不同部分的弯曲铰链上铜迹线也必须采取设计预防措施以确保它们能够满足期望的折叠展开次数。针对此,团队将符合标准且耐撕裂的折叠式弯曲物制作材料Nomex织物层层压到刚性柔性PCB上,并将其用作挠曲材料。
根据具体的任务概念,PUFFER的尺寸可以自行改变。在需要承载更大的仪器、更多的电池或太阳能电池板来获取更多的能量供给或者地形需要较大的车轮进行离地间隙移动时,可以采取更大的PUFFER的尺寸;当然当任务需要缩小PUFFER体积时它也可采取更小的自身尺寸。柔性PCB底盘可以实现较容易的扩展以适应广泛的场景。
目前PUFFER的原型是针对火星地形类型而设计的,该团队正在优化这些类型表面的车轮设计。最近,团队向PUFFER车轮添加了微型特征(灵感来自于各种攀登机器人),并且在与更多通用车轮设计相结合的情况下,其火星模拟测试地形的倾斜性能也得到提高。由于PUFFER将针对具体任务进行定制,因此优化目标地形的移动功能是有意义的。对于目前的计划,团队表示将在拥有PUFFER原型硬件的基础上开始研究自主软件,使父级航天器能够调度和协调它们的群集机器人协同工作。



图像影音设计相关的软件
凡科快图
- 4.5
(95)咨询产品免费试用墨刀
- 3.9
(423)咨询产品免费试用Pixso
- 3.9
(22)咨询产品免费试用



行业专家共同推荐的软件
蓝湖
- 4.0
(584)咨询产品免费试用Canva可画
- 4.0
(206)咨询产品免费试用字魂
- 4.5
(20)咨询产品免费试用



限时免费的图像影音设计软件
Dprox创意3D视频
- 5.0
(1)咨询产品免费试用万兴喵影
- 3.9
(31)咨询产品免费试用易企秀
- 3.8
(260)咨询产品免费试用



新锐产品推荐
法大大
- 3.9
(319)咨询产品免费试用石墨文档
- 4.0
(89)咨询产品免费试用Teambition
- 3.7
(90)咨询产品免费试用微盟微商城
- 3.8
(36)咨询产品免费试用有道云笔记
- 4.0
(73)咨询产品免费试用聚水潭erp
- 4.1
(5)咨询产品免费试用







